

我真的是吐了,已经记不清楚这是第几次安装ros melodic了,又浪费一天时间,这次完整整理一遍!
服了b站的必剪了,录到一半直接崩了,只有前半部分的视频,后半部分大家看这个博客应该就足够了~
b站录制的视频:https://www.bilibili.com/video/BV1wu411k7kF?p=2&share_source=copy_web
本文章中部分内容转载自博客:Ubuntu18.04安装ROS Melodic(详细,亲测安装完成,有清晰的截图步骤)
一、配置安装软件源


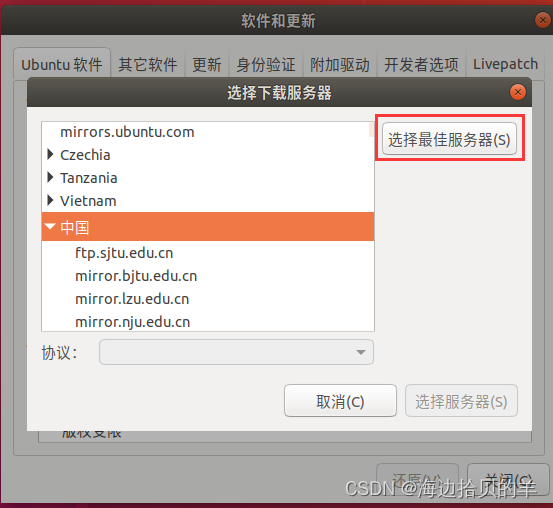
配置Ubuntu存储库以允许”main”, “restricted” ,”universe,” and “multiverse”,如图所示,然后调整服务器来源,点选择最佳服务器,等待一段时间后就会选中国内最快的服务器了,我的是阿里云。
注意,这里采用的是用图形界面进行软件源的换源操作,用命令行进行操作是另一种换源操作,二者选一即可。
; 二、设置ros的安装源
这里请大家参考中国科学技术大学的官方镜像源,因为源的秘钥可能会发生变化,为保证实时性,我在这里贴出科大ustc的镜像源网址:https://mirrors.ustc.edu.cn/help/ros.html
如果在本节中出现安装失败的现象,请大家在评论区留言并自行前往ustc官方网址去查看最新的安装指令、秘钥和公钥。
本节更新于 2022年5月11日
1、首先导入key
gpg --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
gpg --export C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654 | sudo tee /usr/share/keyrings/ros.gpg > /dev/null

2、将软件源添加至系统:
sudo sh -c 'echo "deb [signed-by=/usr/share/keyrings/ros.gpg] https://mirrors.ustc.edu.cn/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'

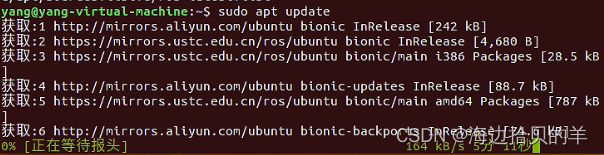
3、刷新软件源缓存 ,安装所需的 ROS 发行版。
sudo apt update
4、开始安装
sudo apt-get install ros-melodic-desktop-full

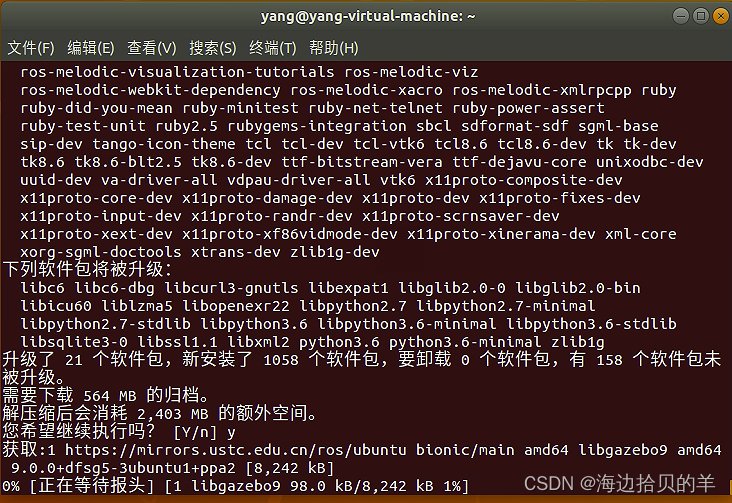

总共获取850次,到100%
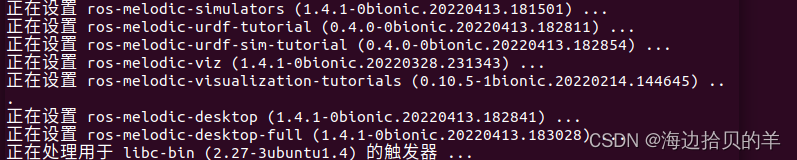
安装的最后一步如上图所示
三、安装过程、出现的问题及解决方法
1、初始化
主要问题出现在 rosdep update这一步,非常感谢公众号: 鱼香ROS 的作者 小鱼 做出的贡献,直接把这个问题一步解决到位了 本文之后,世上再无rosdep更新失败问题!如果有…小鱼就…
上述公众号的方法有一点点小问题,直接参考我下面的代码即可
sudo apt-get install python-pip
sudo pip install rosdepc
sudo rosdepc init
rosdepc update
2、添加环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc

3、为了构建和管理开发者自己的ROS工作空间,还需安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
4、第一次启动ROS时,需要进行环境变量配置,执行如下命令
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc

四、启动运行小海龟例子
1、第一个终端运行如下命令
roscore
2、打开第二个终端,也可以利用 Ctrl+Shift+T 快捷键打开一个新的终端,运行如下命令,这时你会看见一只静止的小海龟
rosrun turtlesim turtlesim_node
3、如果希望小海龟能够移动,打开第三个终端,利用Ctrl+Shift+T快捷键再打开一个新的终端,启动turtlesim的键盘控制节点turtle_teleop_key,运行如下命令
rosrun turtlesim turtle_teleop_key
注意,如果你要控制小海龟运动的话,你的 鼠标应该保持在第三个终端的命令行界面而 不是海龟的图形界面!!!!
五、vscode搭建ros开发环境
直接从ubuntu的商店中安装vscode
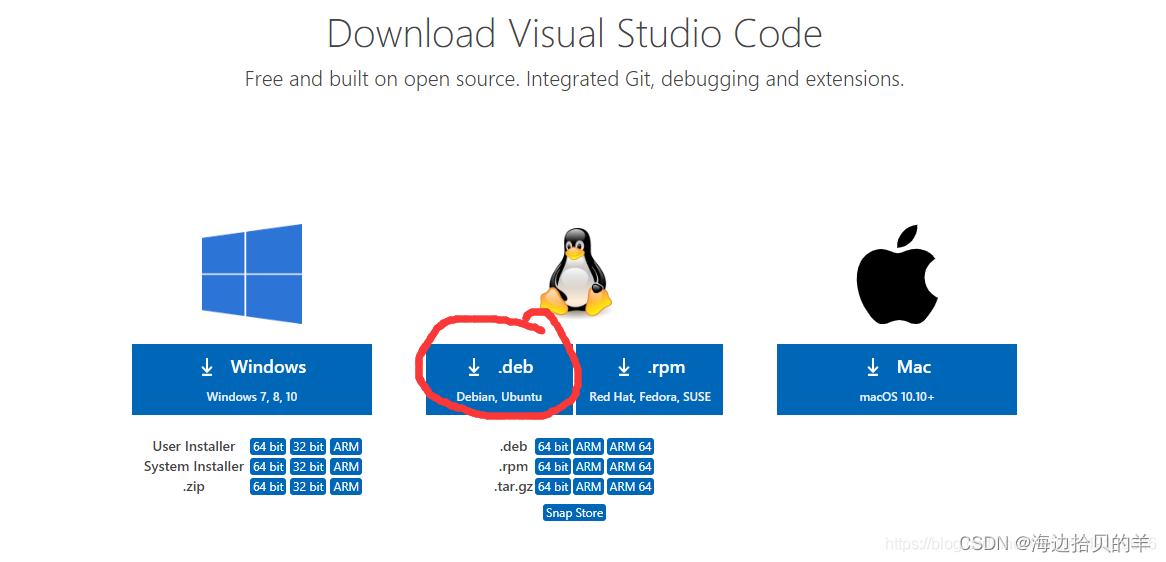
由于直接从ubuntu商店中安装的是snap版本的,是阉割版本的,竟然不能输入中文,直接气死,当我没说前面那句话,大家需要从官网下载deb版本,然后进行安装。
参考博客:ubuntu18.04系统下安装vscode教程
首先在vscode官网 https://code.visualstudio.com/Download 下载.deb安装包到磁盘上;
然后在相应的文件目录下边,在终端中打开,然后执行
sudo dpkg -i 你下载的deb的版本.deb
等待安装好就发现中文可以使用了。
需要安装的扩展:c++、cmake tools、cmake、GBKtoUTF8(防止中文注释出现乱码)、chinese、ROS。
Original: https://blog.csdn.net/qq_41892552/article/details/124716460
Author: 海边拾贝的羊
Title: ubuntu18.04安装ros Melodic吐血整理,有视频有截图 (一个小时安装完成)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558789/
转载文章受原作者版权保护。转载请注明原作者出处!