

一、主题:Fast planner 基本原理学习
二、目标:
- 理解Fast planner轨迹规划处理流程
- 理解hybrid A*的改进点
- B样条曲线定义、性质、以及所带来的便利
三、正文:


主要思想:前端考虑动力学进行规划,后端轨迹优化利用B样条曲线的性质。
- 前端考虑动力学的作用:1、为了后端优化能得到效果更好的轨迹。2、利用Forward direction:discrete (sample) in control space可以很好的几何到A*算法中。
- 后端采用B样条曲线作轨迹规划,在位置上,可以利用几个控制点描述一条曲线,利用B样条曲线的性质,可以将对轨迹的约束、动力学的约束加在控制点上,从而简化了计算。处理顺序是:1、先通过esdf地图提供梯度场信息,设计惩罚函数,使轨迹向障碍物少的地方移动。然后轨迹几何位置不变。在进行时间重分配,使轨迹符合动力学约束(最大速度、最大加速度在允许范围内。)
- 备注:运动规划的轨迹是一条带时间参数的轨迹,同时需要符合避障、动力学的约束。一般工程上前端用来完成满足避障的几何路线。动力学的优化一般放在后端。
优点:
1、使轨迹向梯度场小的方向移动,设计出来的轨迹在障碍物中间,相较其他方法会更加安全。
2、利用了B样条曲线,带来了很大的便利,因为B样条曲线具有以下性质:
*
改变任意控制点,只改变有限时间段的轨迹。
*
B样条曲线的导数仍为B曲线。
缺点:
2、前端处理流程
3、B样条曲线
贝塞尔曲线(Bezier Curve)
- 定义
B ( t ) = ∑ i = 0 n − 1 R i , n ( t ) P i R i , n ( t ) = C n i t i ( 1 − t ) n − i t ∈ [ 0 , 1 ] \boldsymbol{B}(t)=\sum_{i=0}^{n-1} R_{i, n}(t) \boldsymbol{P}{i} \quad R{i, n}(t)=C_{n}^{i} t^{i}(1-t)^{n-i} t \in[0,1]B (t )=i =0 ∑n −1 R i ,n (t )P i R i ,n (t )=C n i t i (1 −t )n −i t ∈[0 ,1 ] -
性质
-
曲线的阶数随着控制点的增加而增加。
- 改变任意一点会影响到整段轨迹。
B样条曲线(B-Spline)
- 定义
C ( t ) = ∑ i = 0 n N i , p ( t ) Q i \mathbf{C}(t)=\sum_{i=0}^{n} N_{i, p}(t) \mathbf{Q}_{i}C (t )=i =0 ∑n N i ,p (t )Q i

-
性质
-
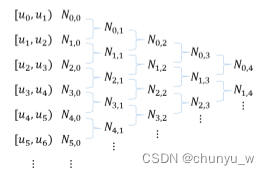
更改控制点(control point)只能影响有限的时间,如图,如果Q 3 Q_{3}Q 3 的点发生移动。只有在时间段u1~u5内,N 1 , 3 N_{1,3}N 1 ,3 不为0。所以改变Q3的位置影响的时间段是有限的。
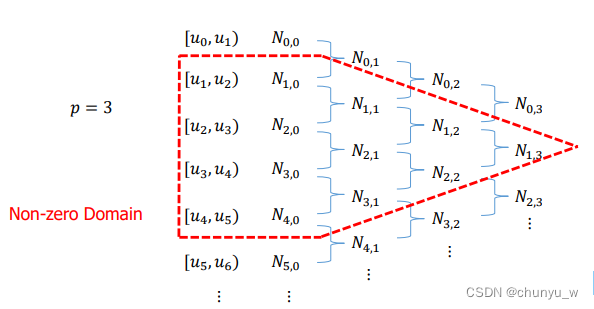
时间范围为什么两边缩小Pb的偏移,由下图可以很容易看出来。
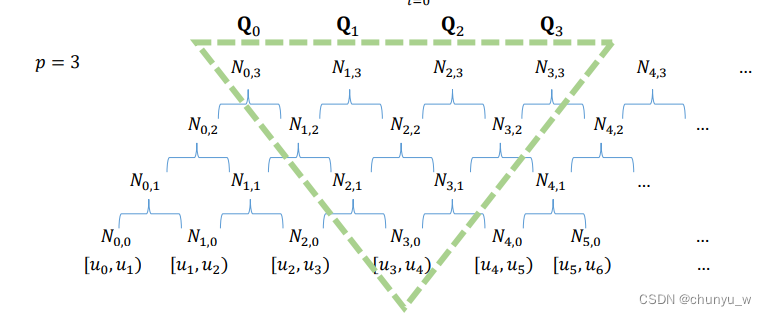
- 一个时间段的轨迹由有限的点决定
如图,[ u 3 , u 4 ) [u_{3},u_{4})[u 3 ,u 4 )的时间段只受到Q 0 、 Q 1 、 Q 2 、 Q 3 Q_{0}、Q_{1}、Q_{2}、Q_{3}Q 0 、Q 1 、Q 2 、Q 3 控制点的作用。

- p>=1具有轨迹连续性质
推到出C(t)的表达式易证。 - B样条的导数还是B样条
- 1阶导
C ( ˙ u ) = ∑ i = 0 n − 1 N i + 1 , p − 1 ( u ) V i \mathbf {C} \dot(u)=\sum_{i=0}^{n-1} N_{i+1, p-1}(u) \mathbf{V}_{i}C (˙u )=i =0 ∑n −1 N i +1 ,p −1 (u )V i - 2阶导
C ( ¨ u ) = ∑ i = 0 n − 2 N i + 2 , p − 2 ( u ) A i \mathbf{C} \ddot(u)=\sum_{i=0}^{n-2} N_{i+2, p-2}(u) \mathbf{A}_{i}C (¨u )=i =0 ∑n −2 N i +2 ,p −2 (u )A i - 控制点的计算
V i = p ( Q i + 1 − Q i ) u i + p + 1 − u i + 1 \mathbf{V}{i}=\frac{p\left(\mathbf{Q}{i+1}-\mathbf{Q}{i}\right)}{u{i+p+1}-u_{i+1}}V i =u i +p +1 −u i +1 p (Q i +1 −Q i )
A i = ( p − 1 ) ( V i + 1 − V i ) u i + p + 1 − u i + 2 \mathbf{A}{i}=\frac{(p-1)\left(\mathbf{V}{i+1}-\mathbf{V}{i}\right)}{u{i+p+1}-u_{i+2}}A i =u i +p +1 −u i +2 (p −1 )(V i +1 −V i ) - 通过对高阶的轨迹表达式求导,可得到物理含义的速度、加速度等信息,且可是B样条曲线,方便利用B样条曲线的凸包性质。
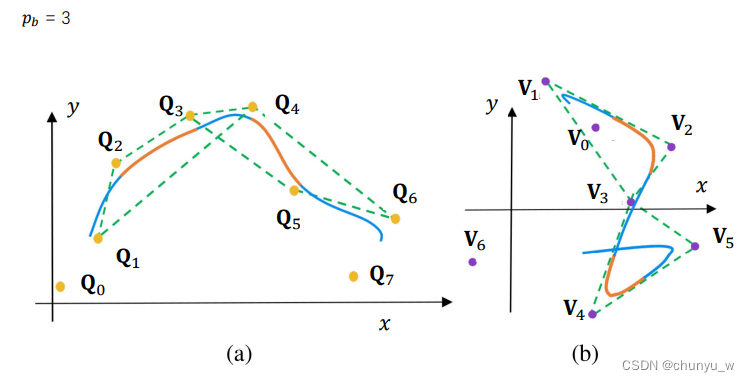
- 凸包性质(Convex Hull Property)
- 直观上看,如下图,最左边的橙色时间段段为控制点
$Q_{0}、Q_{1}、Q_{2}、Q_{3}$控制,可见这段轨迹是在控制点的连线区域内的。时间段以此类推,都在其对应控制点连线的多边行区域内。因此容易将轨迹的障碍物的距离约束,速度、加速度约束,转化到对控制点的约束,从而简化计算。
- 时间均匀的B样条可以化成特殊的表达形式(Fast Planner中使用
通式:
p ( s ( u ) ) = s ( u ) T M 4 q 3 s ( u ) = [ 1 s ( u ) s 2 ( u ) s 3 ( u ) ] T q 3 = [ Q 0 Q 1 Q 2 Q 3 ] T s ( u ) = ( u − u 3 ) / Δ u \begin{aligned} \mathbf{p}(s(u)) &=\mathbf{s}(u)^{\mathrm{T}} \mathbf{M}{4} \mathbf{q}{3} \ \mathbf{s}(u) &=\left[\begin{array}{llll} 1 & s(u) & s^{2}(u) & s^{3}(u) \end{array}\right]^{\mathrm{T}} \ \mathbf{q}{3} &=\left[\begin{array}{llll} \mathbf{Q}{0} & \mathbf{Q}{1} & \mathbf{Q}{2} & \mathbf{Q}{3} \end{array}\right]^{\mathrm{T}} \ s(u) &=\left(u-u{3}\right) / \Delta u \end{aligned}p (s (u ))s (u )q 3 s (u )=s (u )T M 4 q 3 =[1 s (u )s 2 (u )s 3 (u )]T =[Q 0 Q 1 Q 2 Q 3 ]T =(u −u 3 )/Δu
N 0 , 3 ( t ) = 1 6 { t 3 t ∈ [ 0 , 1 ) t 2 ( 2 − t ) + t ( 3 − t ) ( t − 1 ) + ( 4 − t ) ( t − 1 ) 2 t ∈ [ 1 , 2 ) t ( 3 − t ) 2 + ( t − 1 ) ( 3 − t ) ( 4 − t ) + ( 4 − t ) 2 ( t − 2 ) t ∈ [ 2 , 3 ) ( 4 − t ) 3 t ∈ [ 3 , 4 ) N_{0,3}(t)=\frac{1}{6}\left{\begin{array}{cl} t^{3} & t \in[0,1) \ t^{2}(2-t)+t(3-t)(t-1)+(4-t)(t-1)^{2} & t \in[1,2) \ t(3-t)^{2}+(t-1)(3-t)(4-t)+(4-t)^{2}(t-2) & t \in[2,3) \ (4-t)^{3} & t \in[3,4) \end{array}\right.N 0 ,3 (t )=6 1 ⎩⎪⎪⎨⎪⎪⎧t 3 t 2 (2 −t )+t (3 −t )(t −1 )+(4 −t )(t −1 )2 t (3 −t )2 +(t −1 )(3 −t )(4 −t )+(4 −t )2 (t −2 )(4 −t )3 t ∈[0 ,1 )t ∈[1 ,2 )t ∈[2 ,3 )t ∈[3 ,4 )
N 1 , 3 ( t ) = 1 6 { ( t − 1 ) 3 t ∈ [ 1 , 2 ) ( t − 1 ) 2 ( 1 − t ) + ( t − 1 ) ( 2 − t ) ( t − 2 ) + ( 3 − t ) ( t − 2 ) 2 t ∈ [ 2 , 3 ) ( t − 1 ) ( 2 − t ) 2 + ( t − 2 ) ( 2 − t ) ( 3 − t ) + ( 3 − t ) 2 ( t − 3 ) t ∈ [ 3 , 4 ) ( 3 − t ) 3 t ∈ [ 4 , 5 ) . . . N_{1,3}(t)=\frac{1}{6}\left{\begin{array}{cl} (t-1)^{3} & t \in[1,2) \ (t-1)^{2}(1-t)+(t-1)(2-t)(t-2)+(3-t)(t-2)^{2} & t \in[2,3) \ (t-1)(2-t)^{2}+(t-2)(2-t)(3-t)+(3-t)^{2}(t-3) & t \in[3,4) \ (3-t)^{3} & t \in[4,5) \end{array}\right. \…N 1 ,3 (t )=6 1 ⎩⎪⎪⎨⎪⎪⎧(t −1 )3 (t −1 )2 (1 −t )+(t −1 )(2 −t )(t −2 )+(3 −t )(t −2 )2 (t −1 )(2 −t )2 +(t −2 )(2 −t )(3 −t )+(3 −t )2 (t −3 )(3 −t )3 t ∈[1 ,2 )t ∈[2 ,3 )t ∈[3 ,4 )t ∈[4 ,5 )…
可计算t ∈ [ u 3 , u 4 ) t \in[u_{3},u_{4})t ∈[u 3 ,u 4 )段的轨迹:
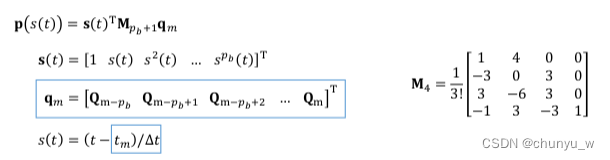
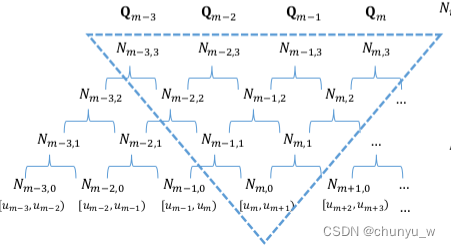
推广到t ∈ [ u m , u m + 1 ) t \in[u_{m},u_{m+1})t ∈[u m ,u m +1 )段的轨迹:
结论:由公式看出,只需要Q m − 3 、 Q m − 2 、 Q m − 1 、 Q m Q_{m-3}、Q_{m-2}、Q_{m-1}、Q_{m}Q m −3 、Q m −2 、Q m −1 、Q m 的点,分配时间Δ u \Delta u Δu,就可以确定`t ∈ [ u m , u m + 1 ) t \in[u_{m},u_{m+1})t ∈[u m ,u m +1 )段轨迹。
p ( s ( u ) ) = s ( u ) T M 4 q m s ( u ) = [ 1 s ( u ) s 2 ( u ) s 3 ( u ) ] T q m = [ Q m − 3 Q m − 2 Q m − 1 Q m ] T s ( u ) = ( u − u m ) / Δ u \begin{aligned} \mathbf{p}(s(u)) &=\mathbf{s}(u)^{\mathrm{T}} \mathbf{M}{4} \mathbf{q}{m} \ \mathbf{s}(u) &=\left[\begin{array}{llll} 1 & s(u) & s^{2}(u) & s^{3}(u) \end{array}\right]^{\mathrm{T}} \ \mathbf{q}{m} &=\left[\begin{array}{llll} \mathbf{Q}{m-3} & \mathbf{Q}{m-2} & \mathbf{Q}{m-1} & \mathbf{Q}{\mathrm{m}} \end{array}\right]^{\mathrm{T}} \ s(u) &=\left(\begin{array}{llll} \left.u-u{m}\right) / \Delta u \end{array}\right.\ \end{aligned}p (s (u ))s (u )q m s (u )=s (u )T M 4 q m =[1 s (u )s 2 (u )s 3 (u )]T =[Q m −3 Q m −2 Q m −1 Q m ]T =(u −u m )/Δu
M 4 = 1 3 ! [ 1 4 0 0 − 3 0 3 0 3 − 6 3 0 − 1 3 − 3 1 ] \mathbf{M}_{4}=\frac{1}{3 !}\left[\begin{array}{cccc} 1 & 4 & 0 & 0 \ -3 & 0 & 3 & 0 \ 3 & -6 & 3 & 0 \ -1 & 3 & -3 & 1 \end{array}\right]M 4 =3 !1 ⎣⎢⎢⎡1 −3 3 −1 4 0 −6 3 0 3 3 −3 0 0 0 1 ⎦⎥⎥⎤
-
理解:B样条曲线是贝塞尔曲线的一种特殊情况,规定了基函数的形式,使B样条有一些新的性质。由三个重要元素组成: degree(阶数)、control points(控制点)、knot vector(时间向量)。
-
基函数计算
N i , 0 ( u ) = { 1 if u i ≤ u < u i + 1 0 otherwise N i , p ( u ) = u − u i u i + p − u i N i , p − 1 ( u ) + u i + p + 1 − u u i + p + 1 − u i + 1 N i + 1 , p − 1 ( u ) u 代 表 时 间 变 量 \begin{array}{l} N_{i, 0}(u)=\left{\begin{array}{lc} 1 & \text { if } u_{i} \leq u -
不同阶的基函数间的计算关系
- 0阶

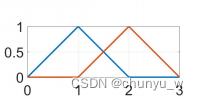
- 1阶
- 2阶
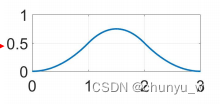
可以看出: 0阶时轨迹就是控制点。1阶时控制点连线的直线。2阶导时控制点有光滑曲线连接(轨迹连续可导)。
- 注意:Faster Planner选用了三阶基函数。通过各阶基函数的计算关系,很好推导B样条曲线的性质。
; 4、后端处理流程
- 代价函数的设计
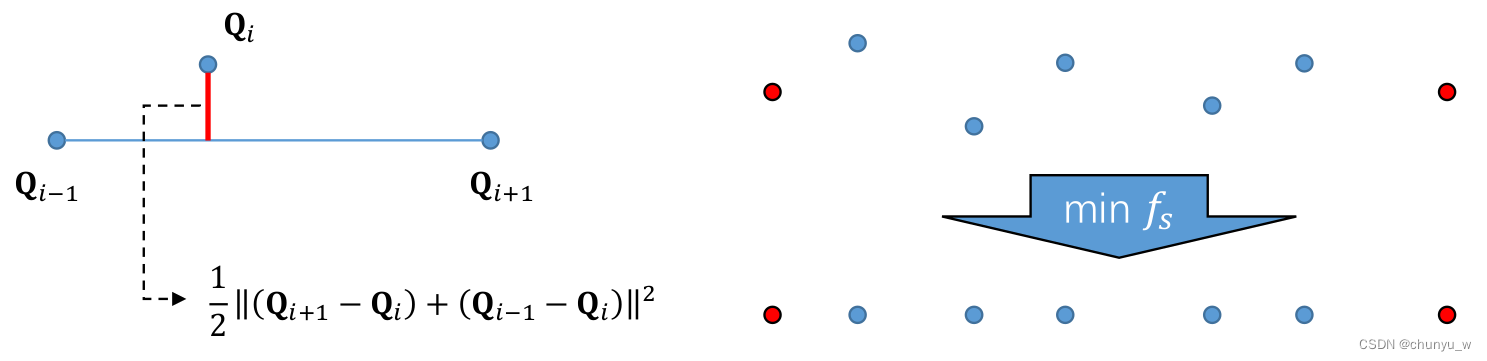
- smoothness cost f s f_{s}f s
f s = ∑ i = p b − 1 N − p b + 1 ∥ ( Q i + 1 − Q i ) + ( Q i − 1 − Q i ) ∥ 2 f_{s}=\sum_{i=p_{b}-1}^{N-p_{b}+1}\left\|\left(\mathbf{Q}{i+1}-\mathbf{Q}{i}\right)+\left(\mathbf{Q}{i-1}-\mathbf{Q}{i}\right)\right\|^{2}f s =i =p b −1 ∑N −p b +1 ∥(Q i +1 −Q i )+(Q i −1 −Q i )∥2
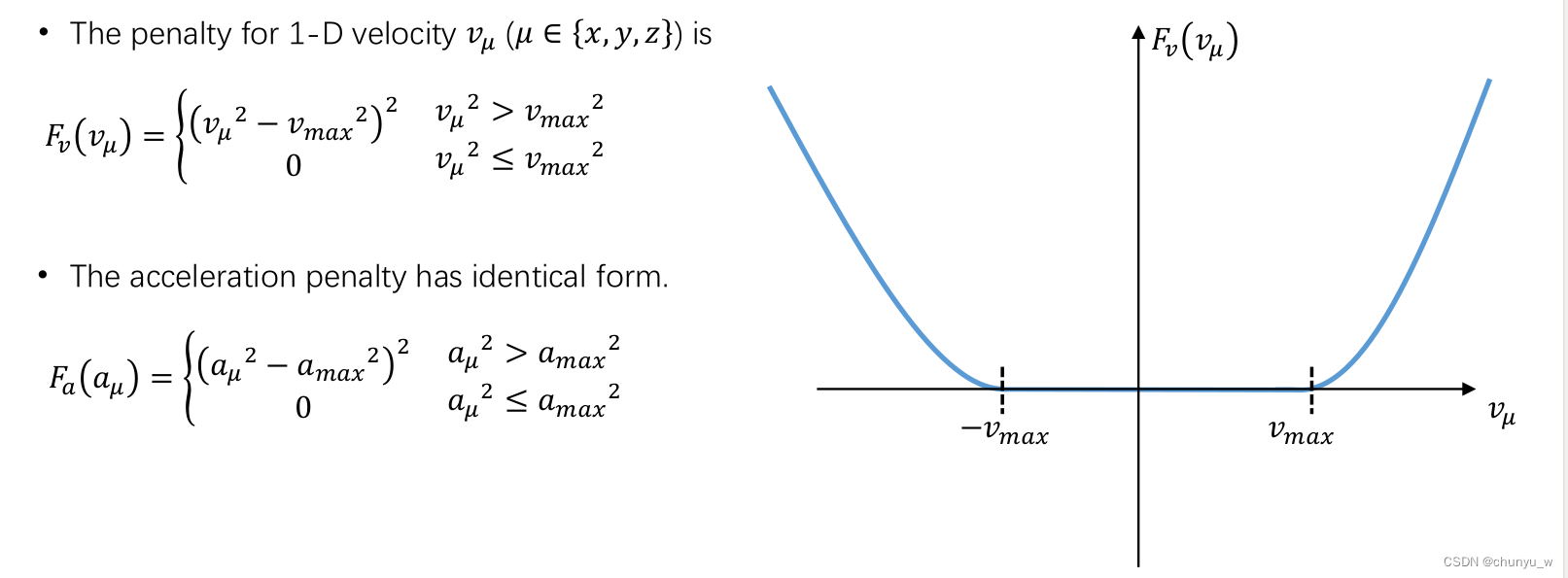
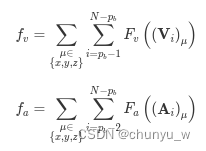
- dynamic feasibility cost f v + f a f_{v}+f_{a}f v +f a
设计惩罚函数
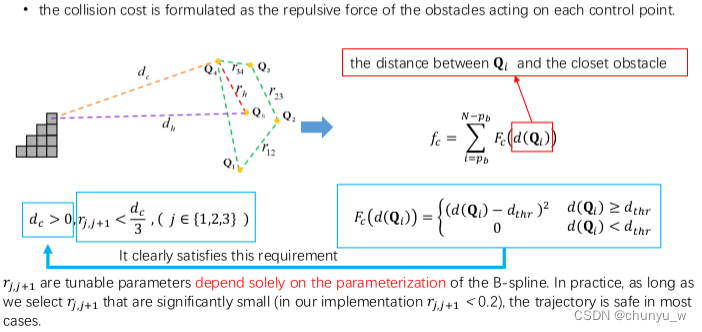
- collision cos f c f_{c}f c f c = ∑ i = p b N − p b F c ( d ( Q i ) ) f_{c}=\sum_{i=p_{b}}^{N-p_{b}} F_{c}\left(d\left(\mathbf{Q}_{i}\right)\right)f c =i =p b ∑N −p b F c (d (Q i ))
可见,由B样条曲线的凸包性质,轨迹的约束都可以转化到控制点上,简化了计算。
- 时间调整
参考:
《深蓝学院》移动机器人运动规划第8章
Original: https://blog.csdn.net/chunyu_w/article/details/125125484
Author: chunyu_w
Title: Fast planner 基本原理学习(一)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558721/
转载文章受原作者版权保护。转载请注明原作者出处!