

目录
1.MPC → Model PredictIve Control
一、了解MPC
1.MPC → M odel P redictIve C ontrol
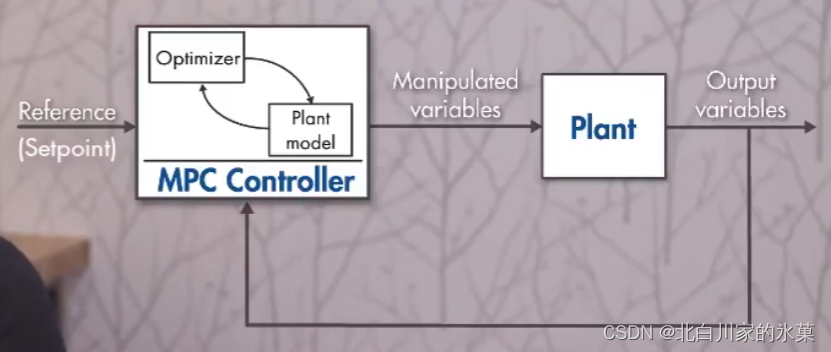
(1)处理对象:输入输出之间有交互作用的多输入多输出系统(MIMO System)
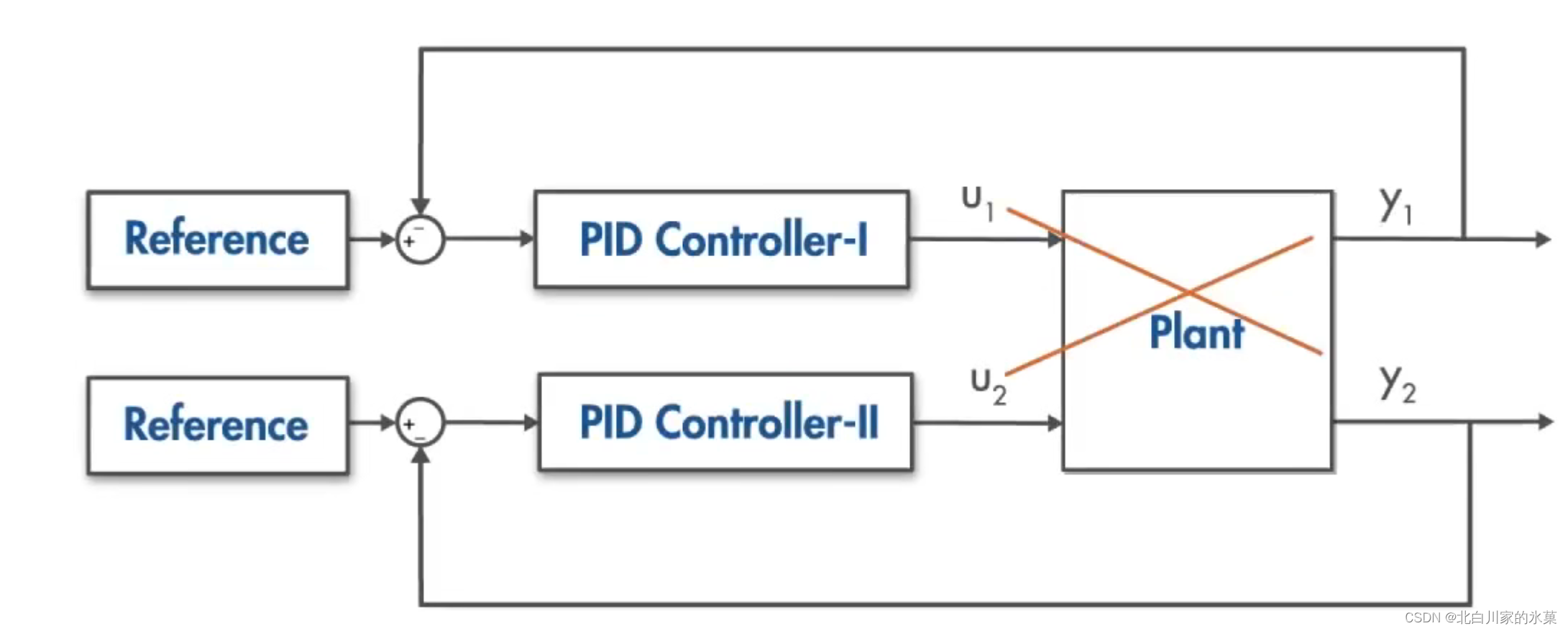

(2)PID 对于该类型系统的局限性:
① 如上图所示,两个回路之间没有交叉,就像二者是相互独立一样
② 如果系统(Plant)足够大,因为调参十分困难
MPC的优势:
① 可以处理多变量问题
② 可以添加约束
e.g.在驾驶时,汽车有期望的轨迹,同时有加速约束
③ 有预览功能(类似前馈),以改善控制器性能
(3)MPC硬件条件
需要功能强大的,内存大的处理器,因为每个时间步骤都需要在线优化问题
2.MPC基本工作原理
以如图的过程为例,期望汽车沿中线运动:
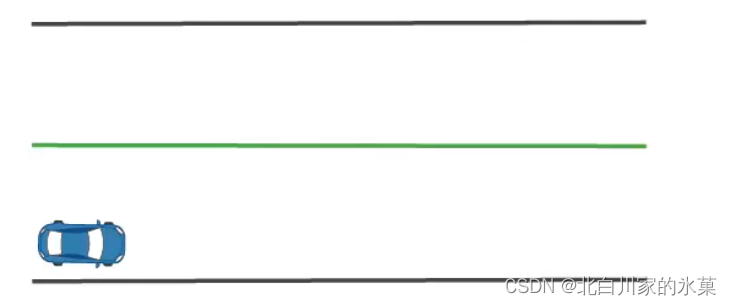
MPC在该过程中的作用如下:
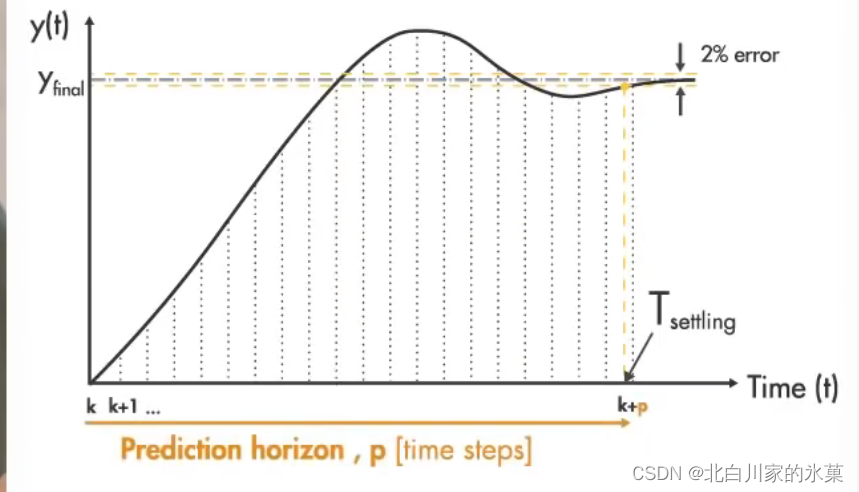
(1)首先,预测一条p步之后可以到达中线的路径(这里有个问题,这个p如何选择呢?选择过少会不会导致无解?过多会不会降低效率?)该过程涉及了汽车模型本身的使用。
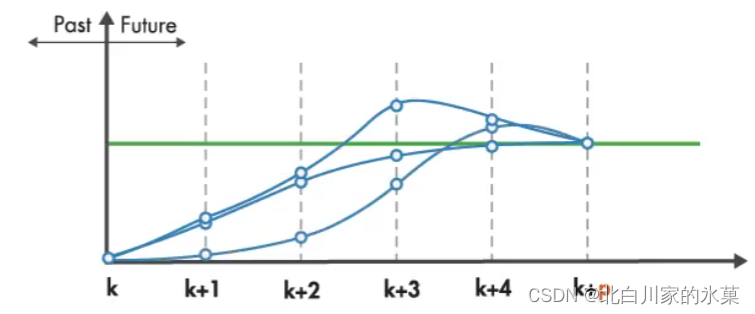
显然这种路径有无穷多条,我们选择”代价(cost)”最小的一条,该过程由优化器(optimizer)完成。对于这种情况,对应的cost包括:
① 汽车在此p步中,每一步的位置都会与中线有一个相对应的偏差值,我们想要这个偏差值之和最小
② 汽车每一次的打舵量要尽可能的小,否则会让乘客十分不舒服,即打舵量之和应该也最小
综上,应该让二者加权和最小,即:
我们总会找到一条使J最小的路径
一般地,有:
(2)进行条件约束,例如车必须在车道里,同时方向盘的转角应该有一个范围
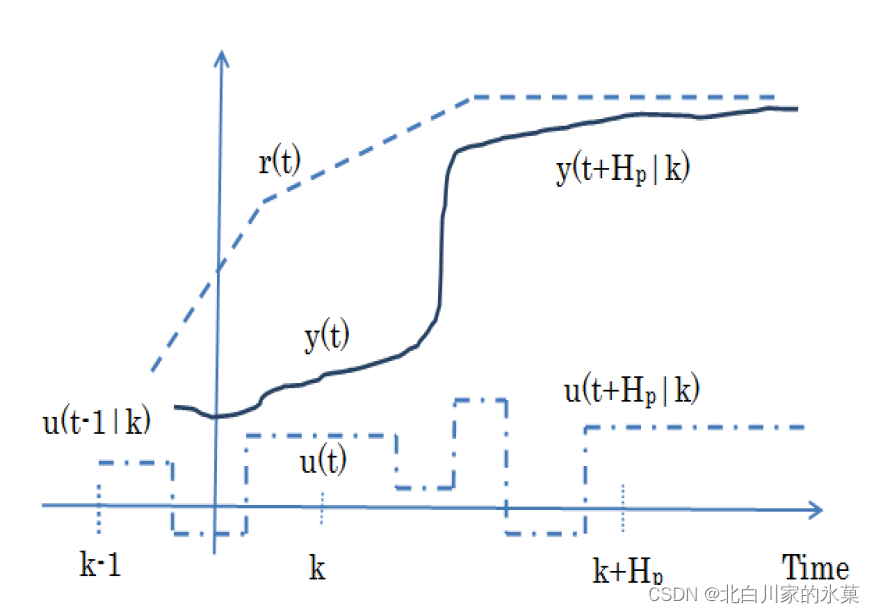
(3)进行该路径中p步中的第一步,即进行响应角度的方向盘转动,而将后面的步骤舍弃

(4)在新的起点重复以上过程,下一次预测的结果可能与上次的预测不同,因为可能有干扰的存在(风,湿滑的路面)
根据上述过程,我们可知,我们每次运动后都在预测未来p步的路径,因此我们所谓的”预测视界”是向前运动的,因此MPC也被称为后退视界控制。
二、MPC设计
1.MPC参数设计
(1)基本参数
① 采样时间
→ 决定控制器执行控制算法的速率
太大:无法快速处理扰动
太小:计算负荷过大
因此一般情况下选择:
② 预测范围:即预测未来事件步长的数量
太短:假如刹车需要5s,但是我只能预测到两秒外的视界,距离交通灯2s路程时开始制动,此时已经来不及了,我们必定会冲过头
太长:可以涵盖之后很长一段时间内的范围,但是如果发生突发情况,比如行人过马路,此时我们必须停车,那么之后就要重新预测,假如我们预测了未来20s的事件,在5s时发生了行人过马路事件,那么后面15s的内容我们就白预测了,即浪费了算力。当然,任何长度的预测范围都可能发生突发情况,但是预测范围越长,我们进行无效预测的时间越长,出现无效预测的概率越大。
因此,我们必须选择一个涵盖整个系统动态的预测范围,但是也不宜太长
建议选择步长20-30
③ 控制范围:控制移动到时间步长m的次数
步长m较大时,可以获得更好的预测,但是会增加复杂性,我们甚至可以是控制范围与预测范围相同,但是一般只有前几个控制动作才对输出行为有影响,因此控制范围最好是预测范围的10%到20%,至少2-3步
进一步理解:
假如”我”是一个学生,”我”的能力对于导师而言是完全可知的,在工程上,就是”我”的模型是完全可知的,导师会给我安排学习任务,假如导师在知道我能力的情况下做好了未来七天的计划(预测范围),但是只给我安排了五天的学习任务(控制范围),但在我完成一天学习后,我可能超额完成任务,也可能不达标(外界干扰导致没有达到预测结果),因此我只完成被安排的学习任务的第一天的任务,在此之后,导师再次制定七天之后的计划,并给我安排下五天的计划。长此以往,导师发现,制定七天的任务太多了,会浪费他宝贵的时间,因此之后改为制定五天计划,安排三天计划。
④ 硬约束和软约束:硬约束必须服从,软约束不一定服从,如果全是硬约束,比如输入输出全部采用硬约束,那么可能会导致无法解决优化问题
软约束可以通过优化问题保证违反程度较小
⑤ 权重:
通过权衡来衡量竞争目标之间的权重(如输入和输出有不同权重)
同时,对于同一个组,我们可以对不同的成员分配权重(如第一输出和第二输出有不同权重)
2.MPC使用范围
(1)线性系统,线性约束条件,有二次cost函数→ 可以使用线性MPC
(2)非线性系统,同样可以使用线性MPC,原理是线性化
如:在自适应MPC中,随着运行条件变化,工作点也变化,因此可以动态地在工作点附近进行线性化,从而动态获得线性模型
注:对于自适应MPC,在不同运行条件下,状态数和约束数不会改变
如果随着操作条件变化,状态数改变:使用增益预定MPC,在感兴趣的工作点进行离线显性化,针对每个工作点设计线性
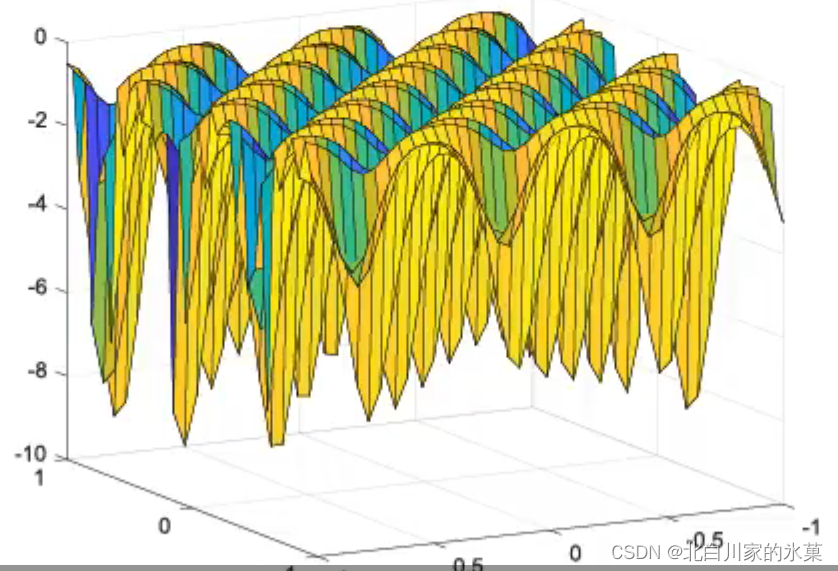
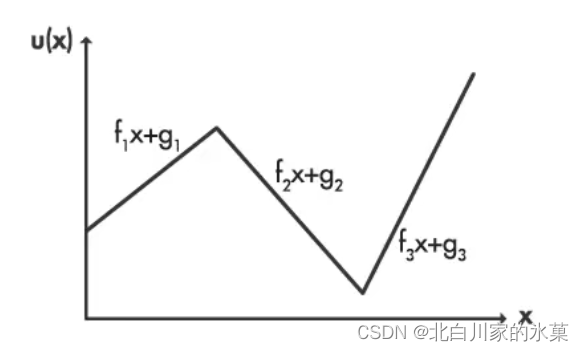
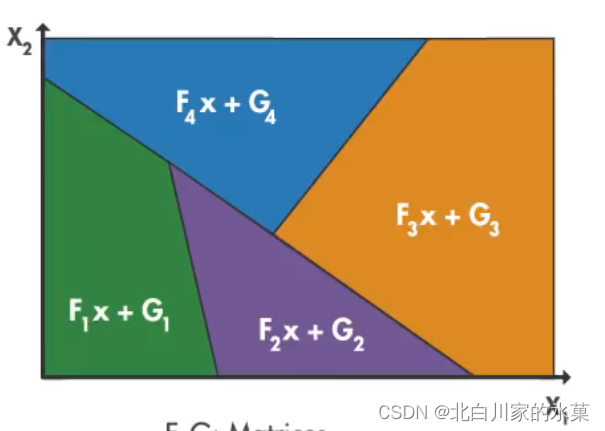
(3)如果非线性系统难以进行线性化,可以使用非线性MPC,此时做出的预测更加准确,但同时,优化问题变得不凸,即可能有很多局部最优解,如图:
3.MPC速度优化
I.(1)模型简化,可以减少状态数量
(2)预测范围适当减小
(3)控制范围适当减小
(4)减少约束数量
(5)降低数据表示精度
II.当采样时间特别小时,可以采用显式MPC(Implicit MPC)
显式MPC特点:离线解决问题,而不是在线优化,对于范围内每个x值,都预先计算最佳解,
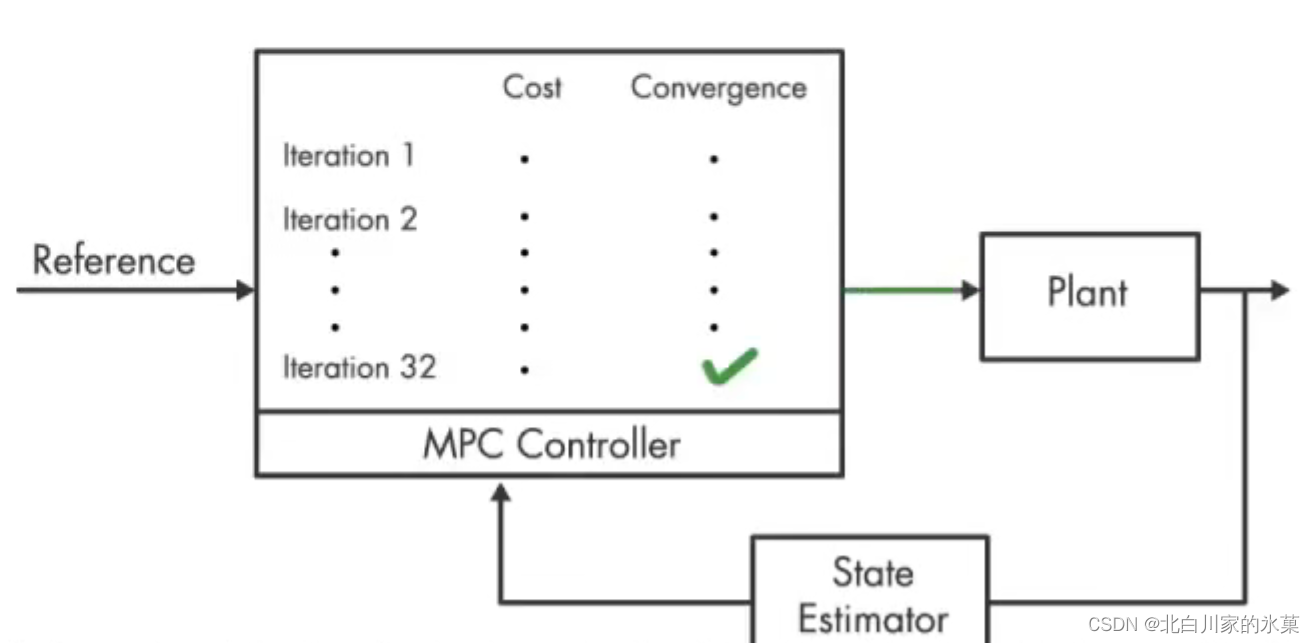
III. 采用次优解决方案
如果想在采样时间内找到解决方案,同时还有多余时间执行其他任务,可以确定迭代次数最大值,当达到最大次数时,停止最优化
三、MPC推导
1.基于单位脉冲响应的公式推导
步骤:
(1)确定模型
(2)进行预测
(3)滚动优化
(4)误差补偿
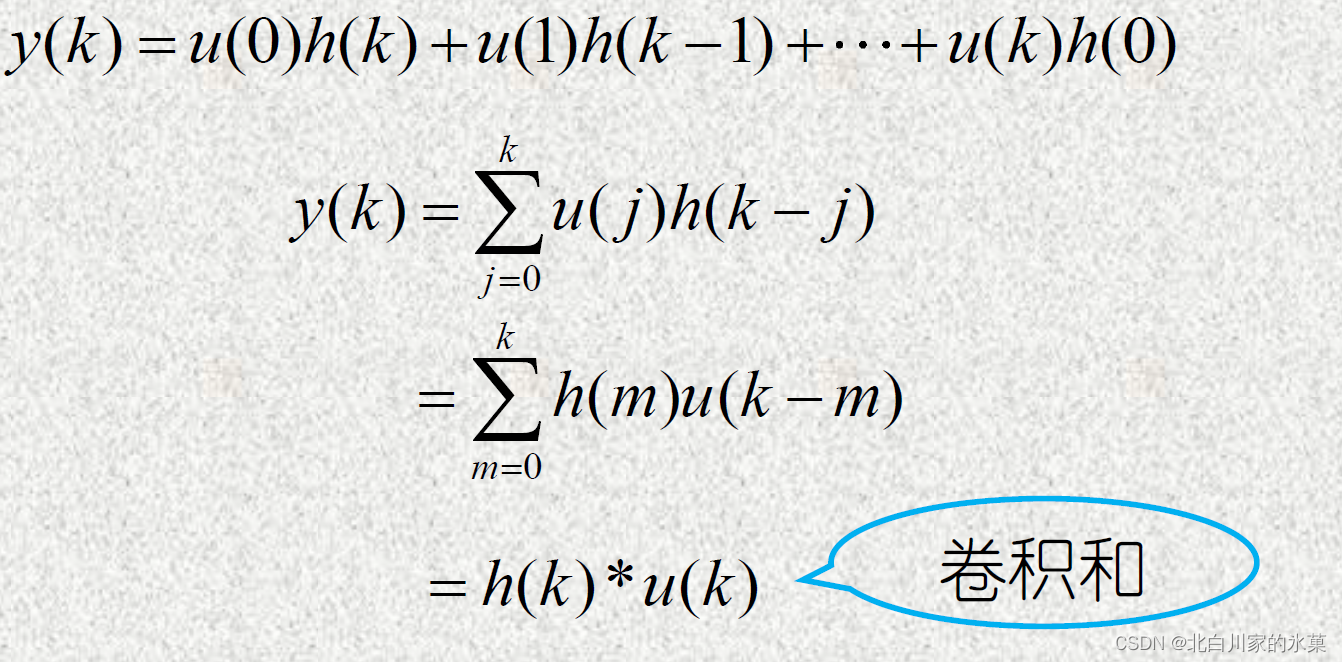
对于模型已知的系统,其单位脉冲响应在每个采样时刻都是可知的,根据离散卷积定理,此时输出可以用输入和单位脉冲响应的卷积计算
假设在k+1时刻开始输入信号,对等式两侧进行差分,则在k+1时刻及其后,有:
.
.
这里需要 注意一点,由于控制范围是m,预测范围为p,一般情况下,控制范围比预测范围要小一点,因此m会小于p,而控制范围反应的是输入信号,因此u只有m个序号,即从k到k+m-1,在第m步预测之后,后面的累加项一直都是m个,因为在第m个采样时间后,由于此时已经超出控制范围,在此之后, 输入量保持上一时刻不变,因此取差分后为0
整理为矩阵形式,如下:
接下来进行滚动优化,优化原则是代价函数的值最小,代价函数分为以下几个部分:
首先,我们希望真实输出与期望轨迹之间的偏差平方和最小,即:
其中
是预测的轨迹,可以通过真实输出与参考输出表示,即:
这相当于是一个滤波,
在[0,1]之间,在i足够大时,趋近于参考值
另外地,我们希望每次输入的偏差之和小一点,以让用户有更好的体验,则有:
则整体的代价函数为:
其中Q、R分别为两项代价的权重
每个元素可以不一样,这样可以分配各个状态变量内部的权重
写成矩阵形式为:
一般地,Q和R都是对角矩阵
对
求偏导数,有:
得:
最后进行误差补偿:
假如在k时刻,我们获得了之后p个时刻的预测值:
在k+1时刻,我们获得了
的真实值
则我们可以评估预测的误差:
设补偿系数为h,h一般为0.5,这里注意下面的公式没有打错,一直都是用k+1点的误差补偿,所以才需要一个补偿系数,因为其他点的误差不见得等于k+1点的误差
则补偿后,有:
.
.
.
用矩阵表示,为:
本质上这是一个状态反馈
则根据滚动预测原则:
其中S为移位矩阵(p*p)

可能看到这里有点乱,我其实一开始也乱了,但是这里捋顺一下思路就好了,乱的原因主要是变量太多,难以区分。
总结:整体的思路是这样的:
我们首先对于这个模型的单位脉冲响应已经得知,那么我们可以获得矩阵A,根据卷积定理,我们可以获得输入变化量,输出变化量,输出初态的关系,即:
其实根据我个人理解,这个也可以认为是: 响应=零输入响应+零状态响应
这个式子只是一个理论基础,用处是告诉我们:只要你知道一个输入变化量,我们就可以预测这个系统的输出
那么这个输入变化量他可不是乱取的,他是有备而来,这就是所谓的优化问题,根据上述推导的公式我们可以得知,
取何值时可以得到最优解
由于模型有误差,再加上可能存在扰动之类的问题,因此我们需要加一个反馈校正,在这里选择的是状态反馈,我们的目的是在目前的时间点,进行预测之后,对这个预测进行合理的矫正,给他加个buff,那么这个buff是怎么算出来的呢,我们不是知道当前时间点的真实值吗,并且我们肯定有之前预测的此刻的预测值数据,我们做一个差,此时我们就知道偏差是多少,乘以一个合适的H矩阵,加上原来的预测值,可以让预测更合理。
当然,我们说这是一个 滚动预测过程,那么滚动体现在何处呢?我们预测完这个时刻后,一定要来到下一个时刻,那么到达”下一个”时刻(k+2)时,k+1就成了过去时,k+1的预测值又可以用来和k+2真实值作差,评估误差,以此类推,以完成滚动,这时S矩阵便派上用场。
2.基于状态空间的推导
基本的原理和冲激响应模型是一样滴,只不过使用的模型不一样
我们不妨设E=Y-R=X,即用状态变量
表示
设在k时刻,初始误差为
,其中是一个向量,因为他可能有很多输出
则根据现代控制理论的知识:
若我们设
则有:
.
.
.
将上面一坨公式整理为矩阵形式:
其中,
为到向量组合,值得注意的是,到在这里是预测值,即 在k点对未来做的 预测,我懒得加帽子了。N为预测范围
记
对于MIMO系统,由于有多个输入,则u为p维向量,所以B为n×p矩阵,且C矩阵上面应该有n行0,
M:(N+1)n×n C:(N+1)n×Np:(N+1)n×1:Np×1
对于代价函数:
其中最后一项是final cost,由于其比过程误差更重要,所以要单独拿出来
整理代价函数:
其中:
代入:
得:
由于J是一个标量,因此内部任何一个式子都是标量,同时:
互相成转置关系,可以合并
令:
则:
最后是 约束的添加
对于matlab中的quadprog函数,调用方法如下:
[x,fval,exitflag]=quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
应用时,首先对于
的限制可以用lb和ub表示
对于状态变量,若有:
代入模型:
深入理解:
对代价函数求导后,可以得到一个
和的关系,本质上就是得到一个输入和状态空间的关系,则输入和状态有:的关系,本质上,这是一个 状态反馈。对于完全能控的系统,状态反馈可以任意配置极点,当然可以保证极点在单位圆内,则系统可以镇定。
这里可以进一步定量推导:
设:
其中
为可测外部干扰变量
两边取微分:
输出:
进一步地:
.
.
.
这个推法和前面差不多,不多说了
则有:
其中:
设参考输入为
定义:
代入
令
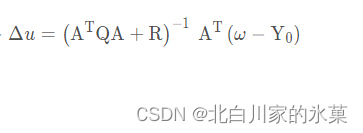
则:
极值为:
这里计算时注意,由于J是个标量,因此其中相加的几个量都是标量,则:
我们只需要第一个元素,即:
不妨设:
即:
是对于未来参考输入的前馈补偿
是对于可预测扰动的前馈补偿
是状态反馈
四、仿真实例
1.SISO系统
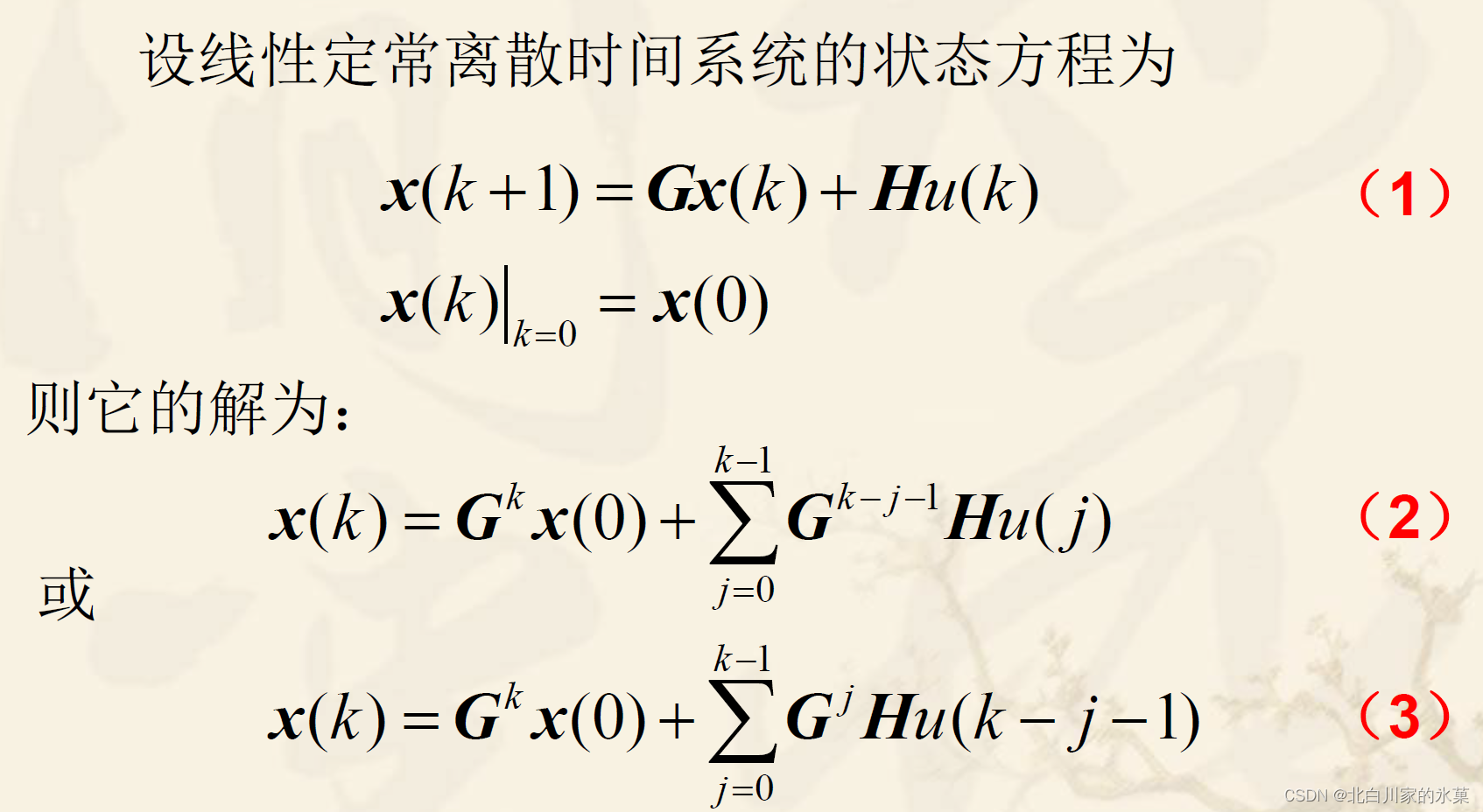
设系统状态空间方程为:
对于该系统,零输入响应如图:
其实从系统A矩阵可以看出,该系统特征值在单位圆外面,所以肯定是发散的
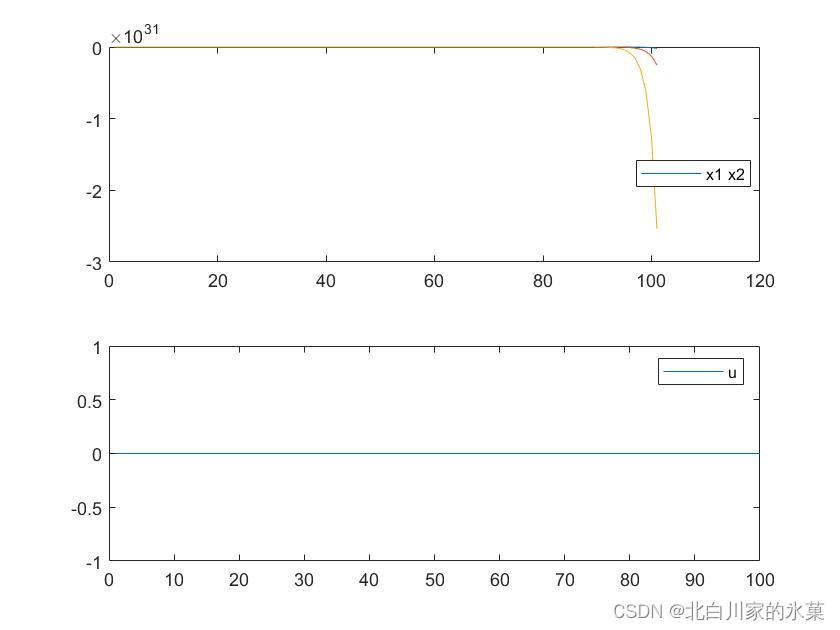
对于单输入系统,加入MPC后,结果如下:
可见加入MPC控制后,系统收敛了,MPC的确起到了状态反馈的作用,使得新的闭环系统的极点处于单位圆内。
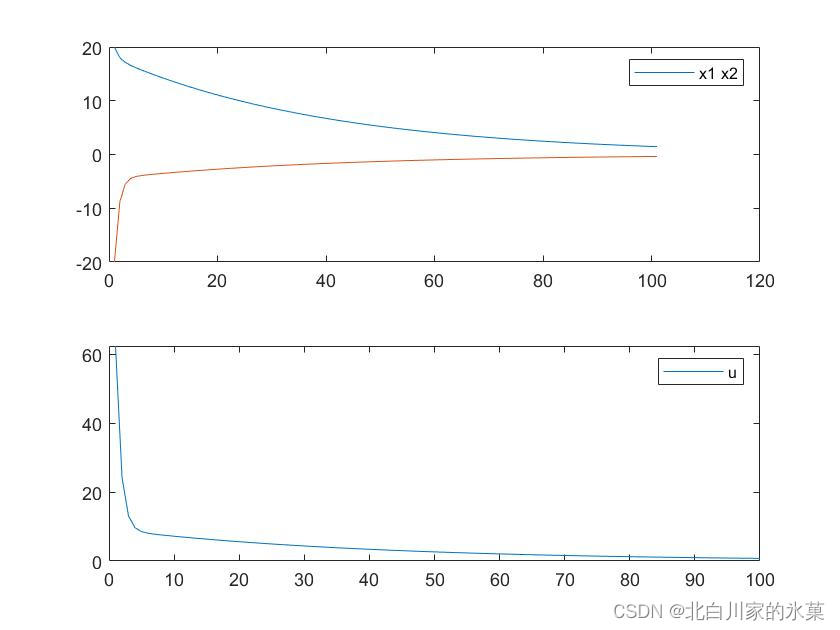
如果提高
的权重,效果如下:
如果提高输入的权重,结果如下:

显然状态空间衰减变慢
如果期望值不是0,如期望
终值为70,结果如下:
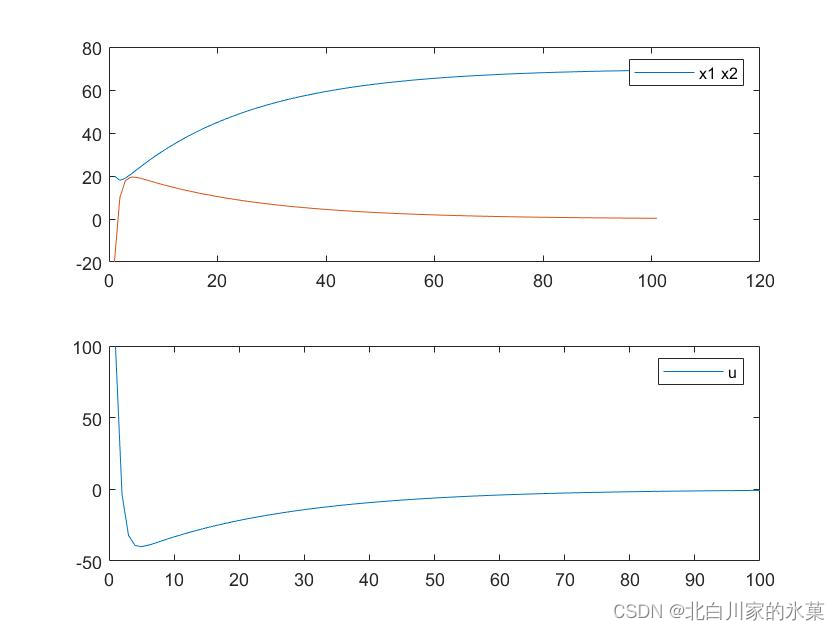
改变目标值的本质原理如下:
一般情况下,对于状态空间
,如果A的特征值在单位圆内(离散状态空间),那么该系统必能收敛至0
设期望值为
,那么偏差值:
两边取微分:
因此偏差也可以衰减至0,且和原状态空间的A矩阵相同,因此可以套用原状态空间的控制方法
下图来自现代控制理论

综上,SISO系统MPC控制代码如下:
mpc_sim.m
clear;
clc;
A=[1 0.1;0 2];
B=[0;0.5];
%x=Ax0+Bu
Q=[2 0;0 1];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1]; %weight of input cost function
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=100;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H]=Cal_matrix(A,B,Q,R,F,N);
X_expect=[70;0];
for k = 1:k_step
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
end
legend("u");
Cal_matrix.m
function [E,H]=Cal_matrix(A,B,Q,R,F,N)
n=size(A,1);
p=size(B,2);
M=[eye(n);zeros(N*n,n)];
C=zeros((N+1)*n,N*p);
temp=eye(n);
for i = 1:N
rows=i*n+(1:n); %this mean from which lines should we start at this step,
%for each matrix has not a single row,we use 'i*n',it starts from n+1
C(rows,:)=[temp*B,C(rows-n,1:end-p)]%"rows-n,1:end-p"means using the
%elements of last step,end -p equals to let out a place for 'temp*B'
temp=A*temp;
M(rows,:)=temp;
end
Q_bar=kron(eye(N),Q);%in order to make a diagonal matrix with Q
% as its diagonal elements
Q_bar=blkdiag(Q_bar,F);
R_bar=kron(eye(N),R);
G=M'*Q_bar*M;
E=C'*Q_bar*M;
H=C'*Q_bar*C+R_bar;
end
prediction.m
function u_k=Prediction(x_k,E,H,N,p)
U_k=zeros(N*p,1);
U_k=quadprog(H,E*x_k);
u_k=U_k(1:p,1);%only use the first step
end
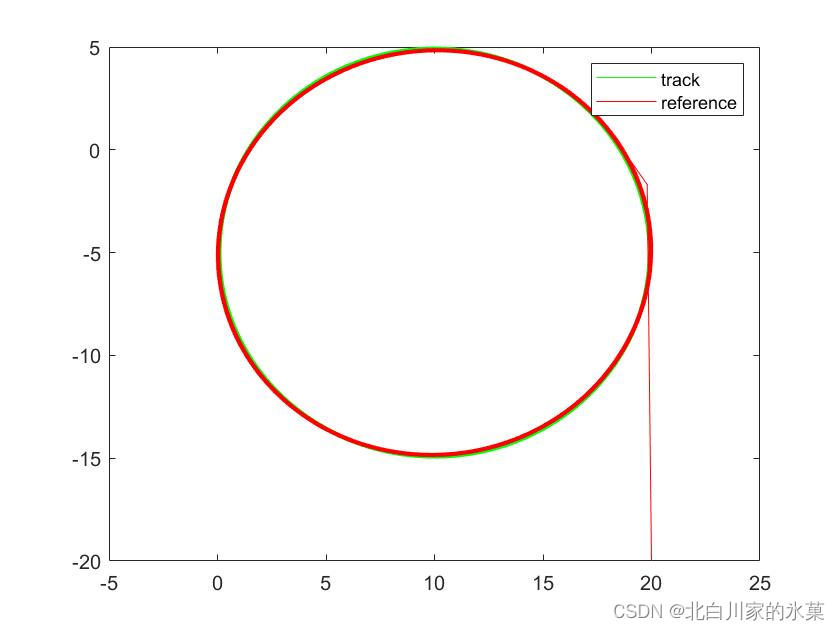
另外,令该系统跟踪圆形轨迹,结果如下:
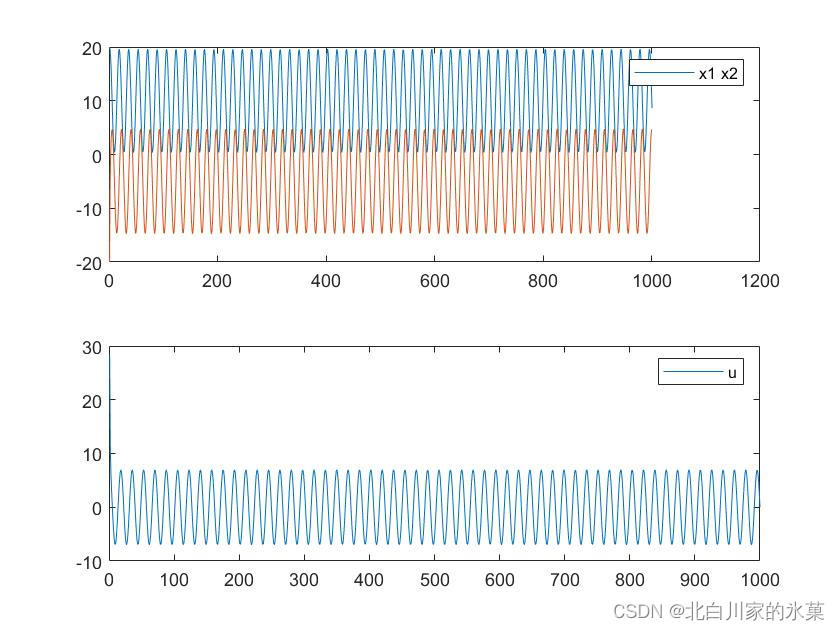
主函数对应如下:
clear;
clc;
A=[0.3 0;0 1];
B=[0;0.5];
%x=Ax0+Bu
Q=[1 0;0 1];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1]; %weight of input cost function
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=1000;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H]=Cal_matrix(A,B,Q,R,F,N);
X_expect=zeros(n,k_step);
for k = 1:k_step
X_expect=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
figure(1)
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
end
legend("u");
hold on;
figure(2);
plot(X_k(1,:),X_k(2,:),'r')
hold on;
X_exp_vec=zeros(n,k_step);
for k = 1:k_step
X_exp_vec(:,k)=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
end
plot(X_exp_vec(1,:),X_exp_vec(2,:),'g')
legend("track","reference");
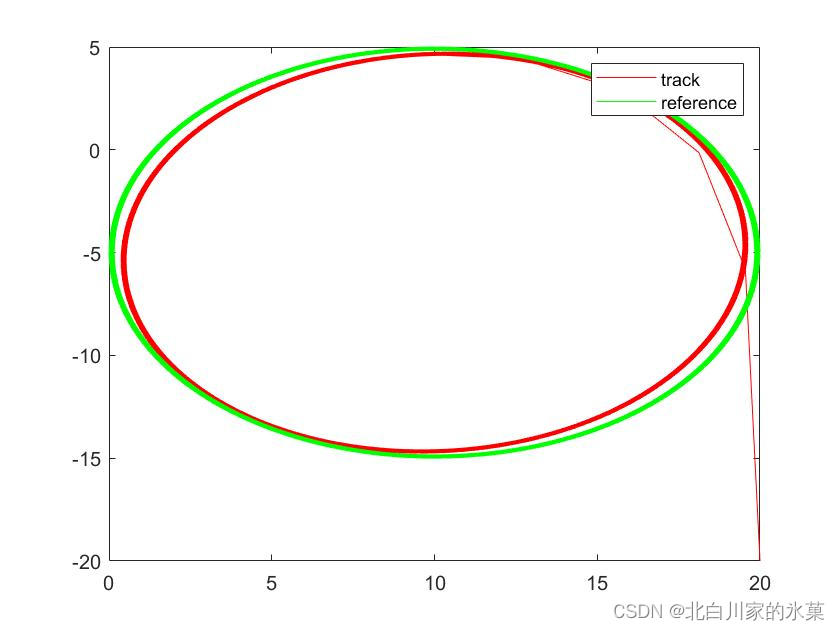
2.MIMO系统
对于MIMO系统:
仿真代码如下:
clear;
clc;
A=[1 0.1;-1 2];
B=[0.2 1;0.5 2];
%x=Ax0+Bu
Q=[1500 0;0 1500];%weight of error cost function
F=[1 0;0 1];%weight of error cost function(last step)
R=[0.1 0;0 0.1]; %weight of input cost function
lb=[-200;-200];
ub=[200;200];
MIN=[-20;-20;-20;-20;-20;-20;-20;-20;-20;-20;-20;-20];
MAX=[20;20;20;20;20;20;20;20;20;20;20;20];
n=size(A,1);%the dimension of the state space
p=size(B,2);%the dimension of input vector
k_step=1000;%steps of my state space
X_k=zeros(n,k_step);%set state space vector
X_d=zeros(n,k_step);
X_k(:,1)=[20;-20];%initialization of the state space
U_k=zeros(p,k_step);%set input vector
N=5; %prediction horizon
basic = eye(n);
[E,H,M,C]=Cal_matrix(A,B,Q,R,F,N);
A_k=[C;-C];
b_k=[MAX-M*X_k(:,1);-MIN+M*X_k(:,1)];
X_expect=zeros(n,k_step);
for k = 1:k_step
X_expect=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
X_d(:,k)=X_k(:,k)-X_expect;
U_k(:,k)=Prediction(X_d(:,k),E,H,N,p,A_k,b_k,lb,ub);%with k adding,the initial value of
%X_k also changes,so this is what is called recursive optimization
X_d(:,k+1)=A*X_d(:,k)+B*U_k(:,k);%recursion of state space
X_k(:,k+1)=X_d(:,k+1)+X_expect;
end
figure(1)
subplot(2,1,1);
for i= 1 :size(X_k,1)
plot(X_k(i,:));
hold on
end
legend("x1 x2");
hold on;
subplot(2,1,2);
for i =1:size(U_k,1)
plot (U_k(i,:));
hold on
end
legend("u");
hold on;
figure(2);
X_exp_vec=zeros(n,k_step);
for k = 1:k_step
X_exp_vec(:,k)=[10*cos(360/k_step*k)+10;10*sin(360/k_step*k)-5];
end
plot(X_exp_vec(1,:),X_exp_vec(2,:),'g')
hold on;
plot(X_k(1,:),X_k(2,:),'r')
legend("track","reference");
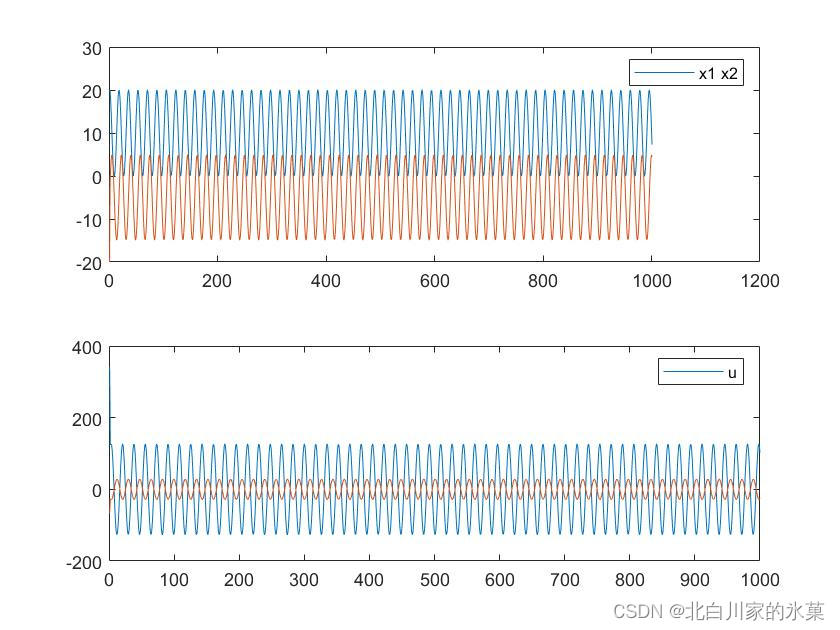
该代码在原基础上加入了约束条件,如果代码运行不了可以将约束去掉,仿真结果如下,其中
权重提高可以提高跟踪的效果
在simulink中使用mpc controler搭建框图如下:
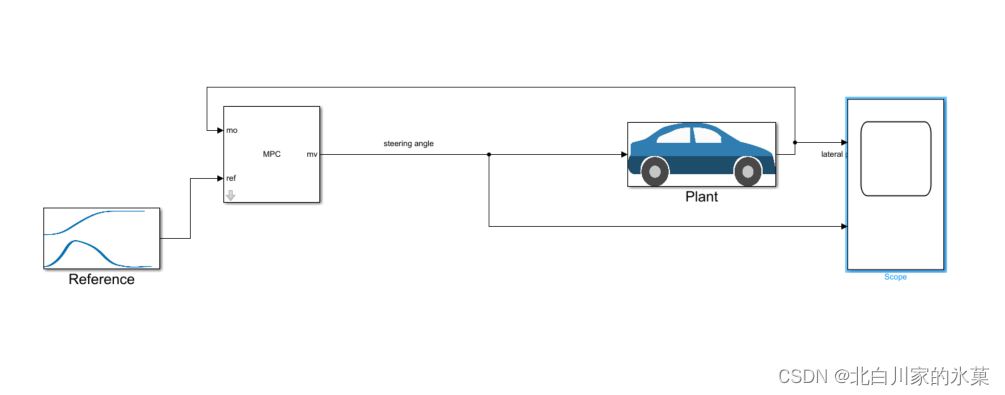
搭建教程: 【Model Predictive Control】了解模型预测控制,第六部分:如何使用 Simulink 和模型预测控制工具箱设计 MPC 控制器_哔哩哔哩_bilibili
给定约束:
① 方向盘物理转角不得超过30°
② 为了保证舒适度,方向盘变化率不得超过15°/s
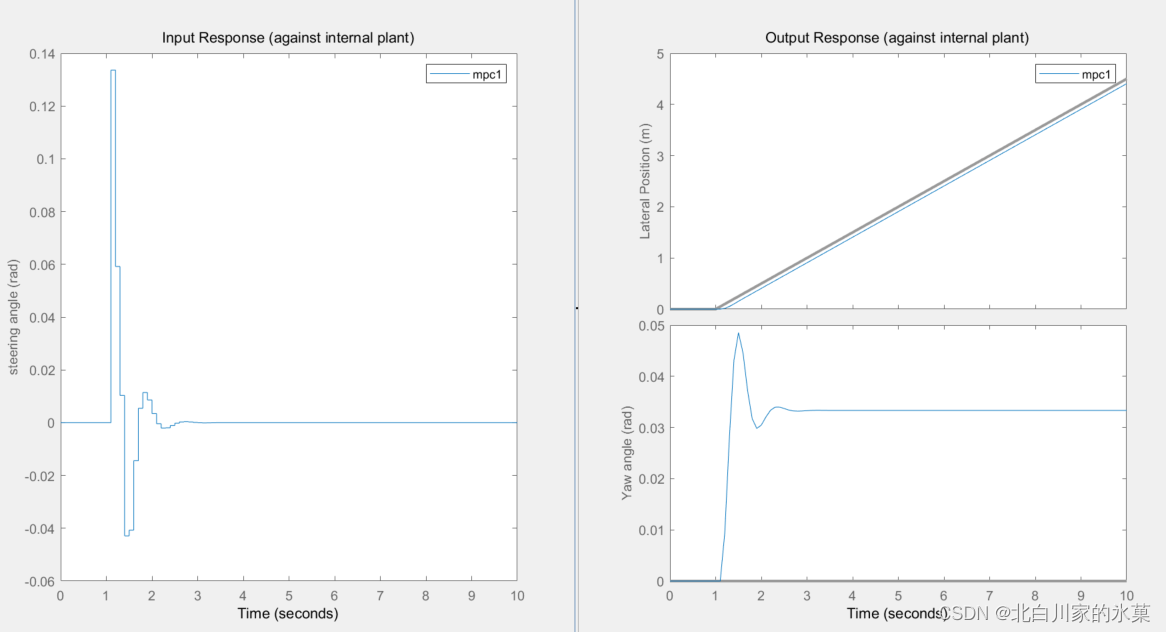
在此条件下,仿真结果如图:
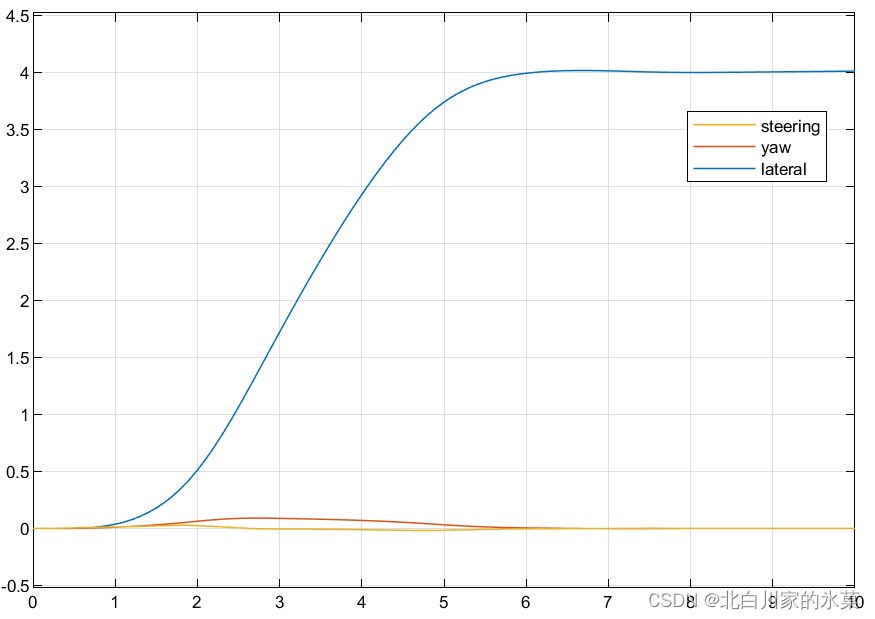
在预测范围为10,控制范围为2时,结果如下:
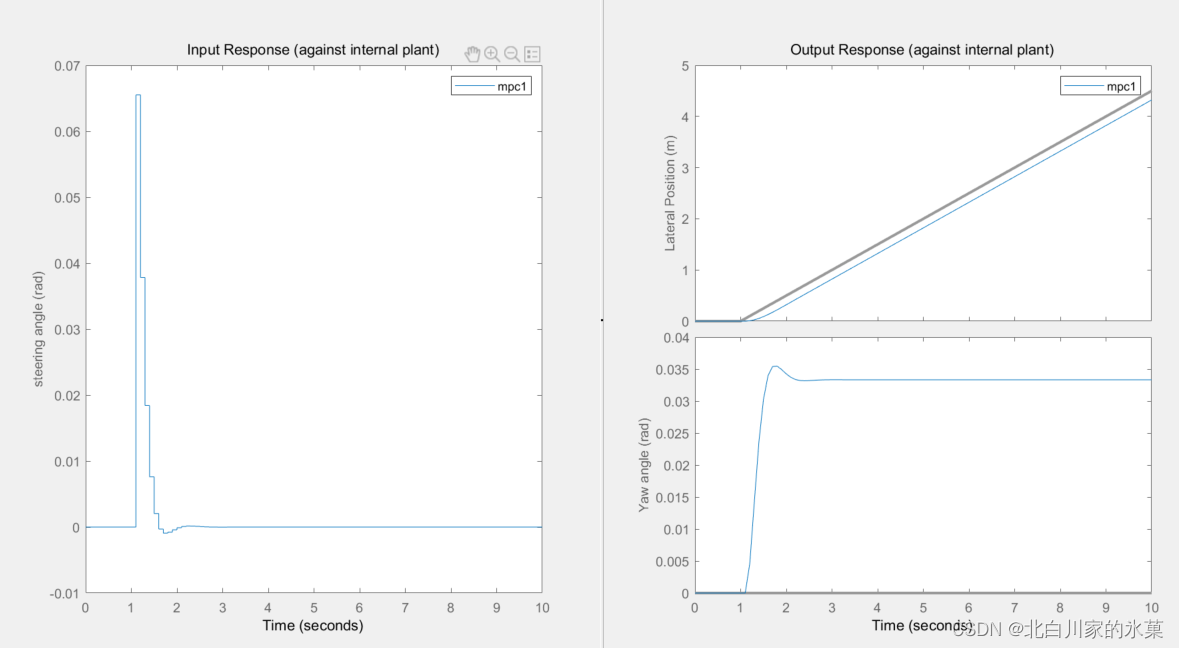
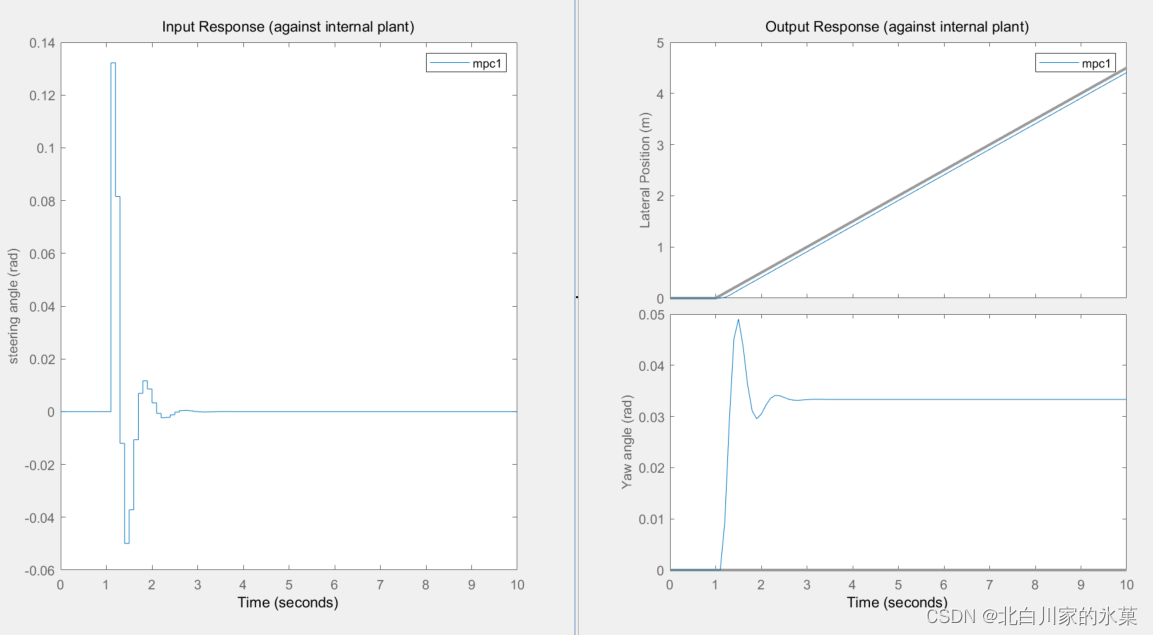
如果将prediction horizon变大,结果如下:

超调此时减小了,但是预测范围太大可能会造成算力的浪费
将控制范围变大,可见跟踪效果更好,跟踪曲线更接近reference
然而,进一步提高控制范围,发现结果变化并不大,所以我们一般取预测范围的20%-30%就可以了
当速度提升至35时,结果如下:
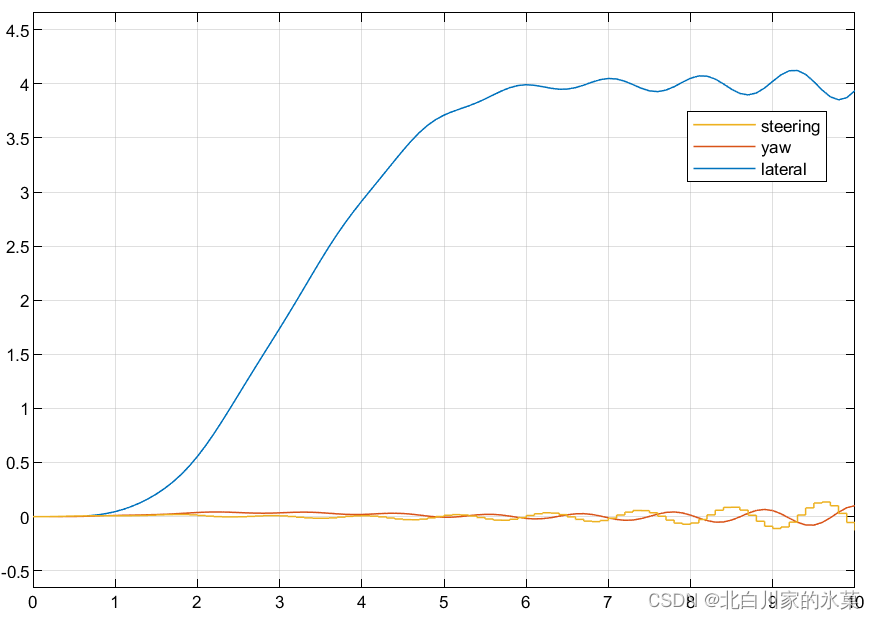
可见跟踪效果并不好,所以我们最好添加自适应MPC(adaptive MPC)
4.车辆横向运动状态空间模型的推导
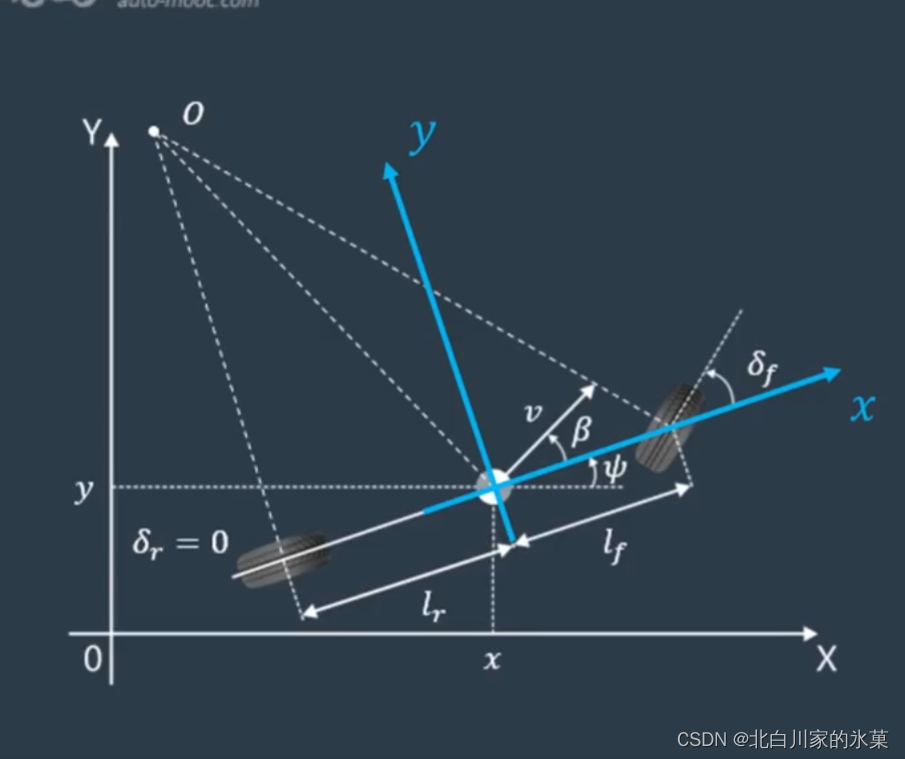
这里就必须要提及著名的自行车模型
自行车模型的条件如下:
① 车辆做平面运动
② 左右前轮的转向角近似相等
③ 忽略轮胎收到的侧向力
④ 忽略前后轴荷载的转移
⑤ 车身和悬架系统是刚性的
其中② ③限制了车体必须是低速运动的
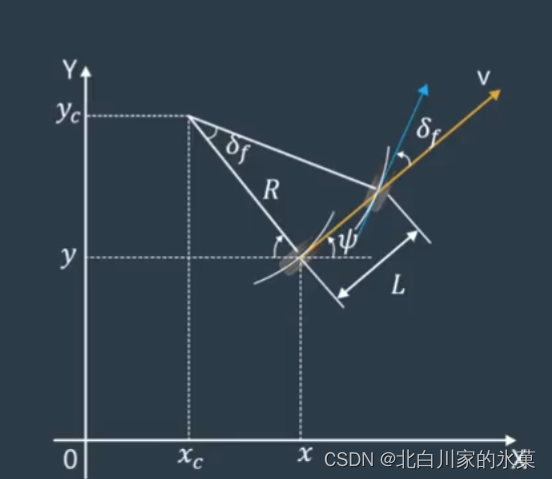
我们选择状态变量:
x,y:车辆在绝对坐标系的位置
v:车辆的速度大小
: 车辆的转角大小

假如这是一辆车,则有:
:前轮与车辆纵轴之间的夹角
:后轮与车辆纵轴之间的夹角(如果后轮不能转就是0)
:质心侧偏角,即车辆速度与纵轴之间的偏角,低速行驶时认为特别小
A B为前后轮的速度质心,C为车体整体质心,下面以C为原点推导自行车模型,当然,我们可以以A,B为原点推导,过程相似,结果略有差异
设PC=R
则有:
整理得:
联立以上两式,同时在低速时,我们假设R变化缓慢,那么:
与以上两式联立,得:
在质心处:
此时反解
:
在高速情况下,外力对于车辆的影响是比较大的,所以我们不光要考虑运动学模型,更要考虑动力学模型
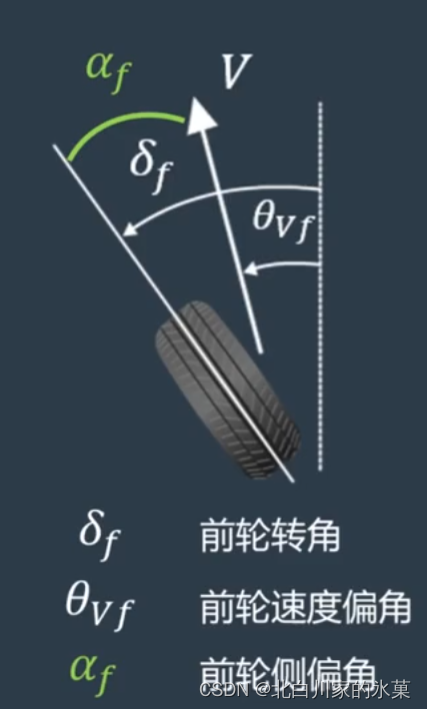
在低速时,我们通常认为轮胎的朝向就是车的运动方向,但是在高速行驶时并不是这样,因为轮胎存在侧偏特性,即车轮的速度方向并不是轮胎的朝向
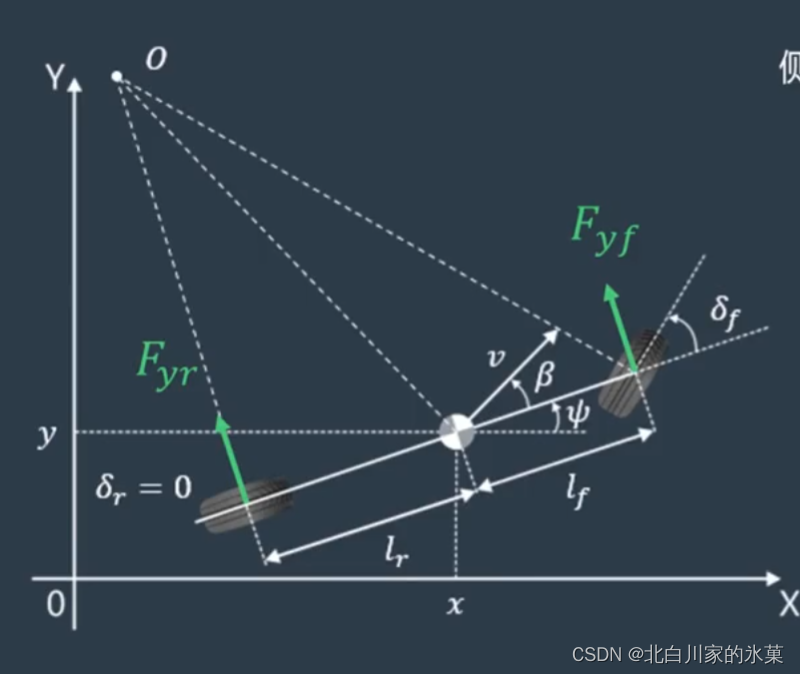
对于横向动力学模型,有以下假设:
① 忽略悬架运动、道路倾斜度、空气动力学等非线性效应
② 忽略轮胎力的纵横向耦合关系
以车体质心为原点,车体纵轴为x轴建立坐标系如下:
对于侧向,有:
而侧向加速度包括 运动加速度和 向心加速度
代入:
对于横摆运动(即绕z轴的转动):

对车轮进行受力分析,车轮受侧向力(风吹,提供离心力的摩擦)和纵向力(摩擦,牵引),二者可以合成为车体的横向力
很小,所以可以忽略
侧偏力和侧偏角关系如图:
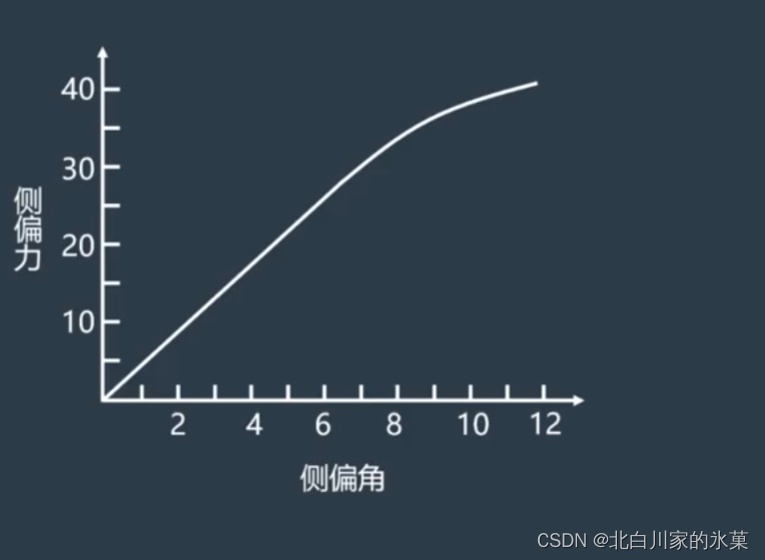
在侧偏角较小时,可以认为:
其中C为侧偏刚度
因此:
对前后轮进行速度分解,得:

代入侧向力表达式:
代入横向动力学方程,并整理成矩阵形式
令:
为状态向量
为控制量
为已知参数
得:
可见,车体的横向运动模型和车的
是有关系的
5.自适应MPC
自适应MPC可以在运行的每一步提供一个新的,合适的线性模型,确保在新的运行条件下做出更准确的预测
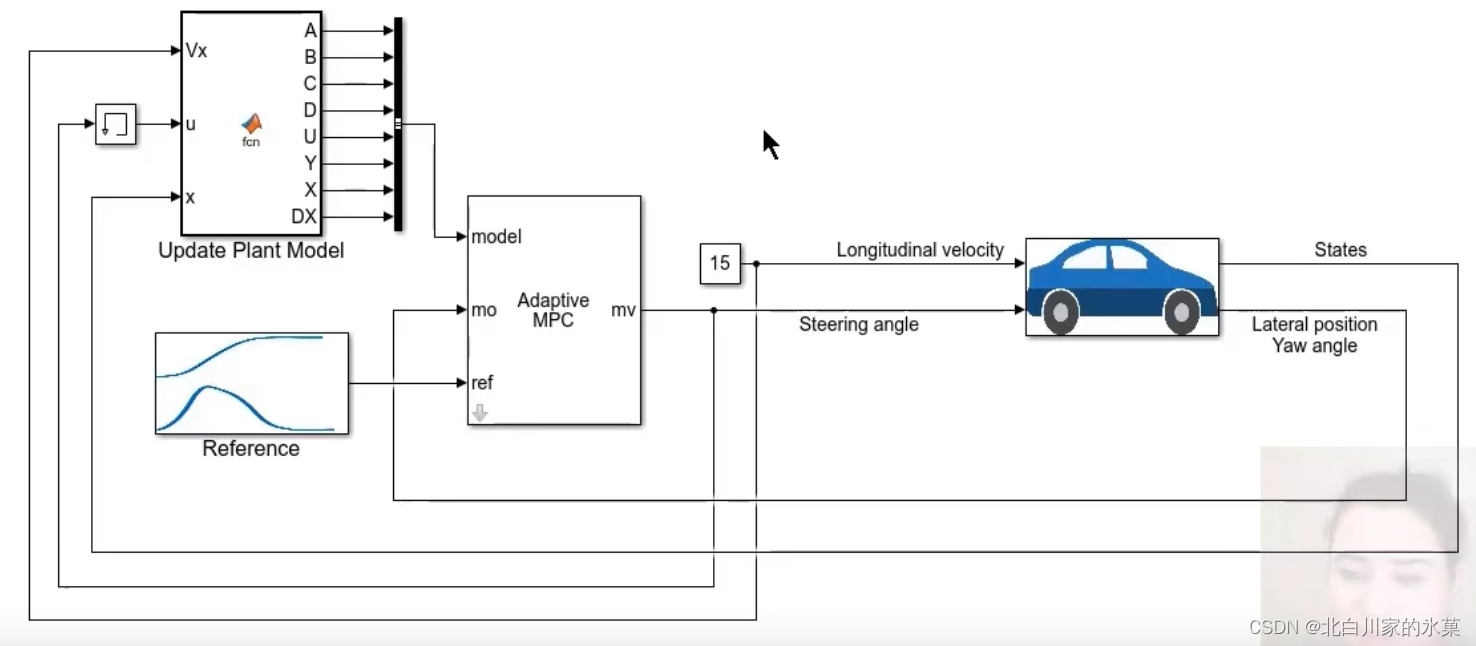
这个我没做出来,因为属实不知道怎么改这个plant,所以直接截图了
更改
的值,甚至可以将其改为正弦信号,结果如下:
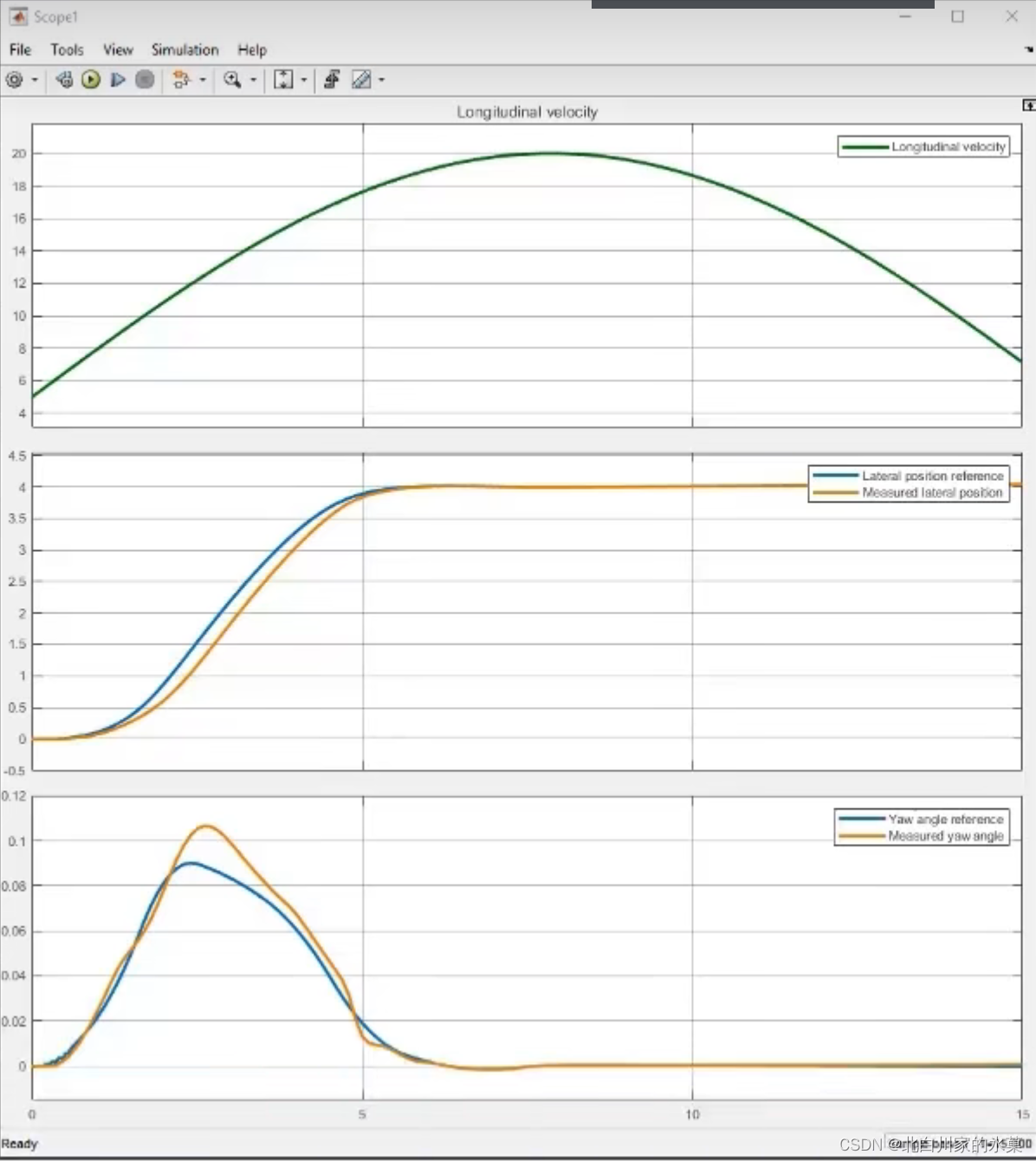
可见MPC的确可以根据不同的模型,不同的条件进行自适应控制
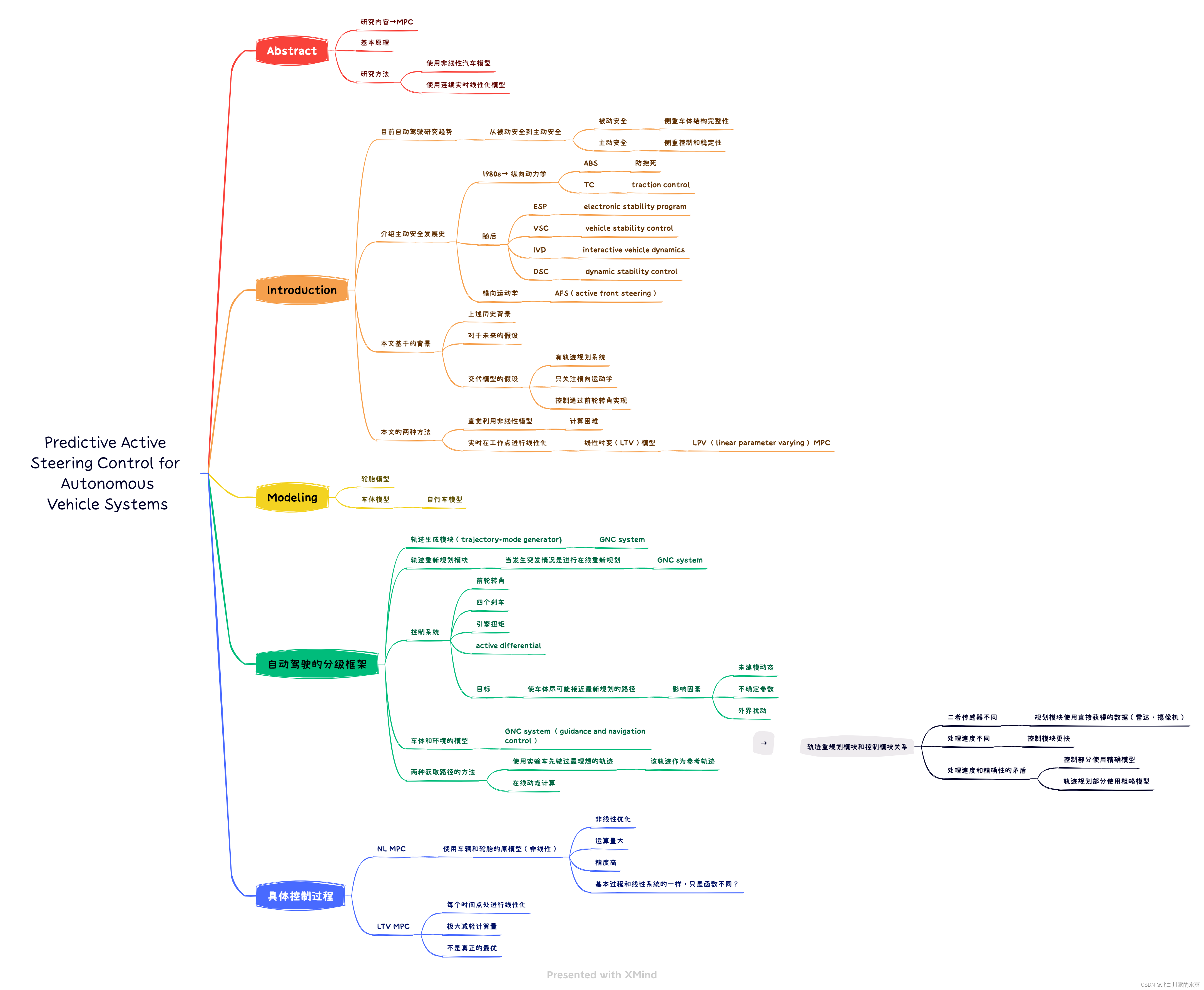
五、多种MPC类型拓展
1.非线性MPC(nonlinear MPC\NMPC)
参考文献:
[PDF] MPC-Based Approach to Active Steering for Autonomous Vehicle Systems | Semantic Scholar
2.线性时变MPC(LTV MPC)
面对非线性模型,我们一般有两个思路:
一个是直接采用非线性模型,对原来模型直接进行控制
另一个是对模型进行连续的在线线性化
3.Explicit MPC(显式MPC)
参考文献
显式预测控制(Explicit MPC)_dymodi的博客-CSDN博客_显式模型预测控制
Original: https://blog.csdn.net/aliezaliezaliez/article/details/125824161
Author: 北白川家的氷菓
Title: MPC算法学习(1)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558651/
转载文章受原作者版权保护。转载请注明原作者出处!