

文章目录
前言
局部路径规划是无人驾驶车辆运动规划的一个重要部分,其中五次多项式是局部路径规划中常用的一种算法。笔者将结合开源的课程和代码学习一下五次多项式的应用。
曲线插值法
我们常用三次多项式曲线或者五次多项式曲线规划无人车运动轨迹。多项式曲线一般而言都是奇数,这是由于边界条件引起的。我们可以这样理解: 边界条件一般包含车辆的初始状态和终止状态,因此 两倍的车辆状态有 偶数个系数,也就造成了方程有奇数多项式。
- 三次多项式:求解位置和速度
- 五次多项式:求解位置、速度、加速度
- 七次多项式:求解位置、速度、加速度、加加速度
五次多项式曲线方程
写在最前面: 五次多项式曲线做路径规划时,y不是关于x的曲线,而是 y和x都是关于t的曲线,这一点初学者需要搞清楚
五次多项式曲线插值轨迹规划
- 位置:
x ( t ) = a 0 + a 1 t + a 2 t 2 + a 3 t 3 + a 4 t 4 + a t 5 x(t) = a_0 + a_1t + a_2 t^2 + a_3 t^3 + a_4 t^4 + a_ t^5 x (t )=a 0 +a 1 t +a 2 t 2 +a 3 t 3 +a 4 t 4 +a t 5
y ( t ) = b 0 + b 1 t + b 2 t 2 + b 3 t 3 + b 4 t 4 + b t 5 y(t) = b_0 + b_1t + b_2 t^2 + b_3 t^3 + b_4 t^4 + b_ t^5 y (t )=b 0 +b 1 t +b 2 t 2 +b 3 t 3 +b 4 t 4 +b t 5 - 速度:
x ′ ( t ) = a 1 + 2 a 2 t + 3 a 3 t 2 + 4 a 4 t 3 + 5 a t 4 x'(t) = a_1 + 2a_2 t + 3a_3 t^2 + 4a_4 t^3 + 5a_ t^4 x ′(t )=a 1 +2 a 2 t +3 a 3 t 2 +4 a 4 t 3 +5 a t 4
y ′ ( t ) = b 1 + 2 b 2 t + 3 b 3 t 2 + 4 b 4 t 3 + 5 b t 4 y'(t) = b_1 + 2b_2 t + 3b_3 t^2 + 4b_4 t^3 + 5b_ t^4 y ′(t )=b 1 +2 b 2 t +3 b 3 t 2 +4 b 4 t 3 +5 b t 4 - 加速度:
x ′ ′ ( t ) = 2 a 2 + 6 a 3 t + 12 a 4 t 2 + 20 a t 3 x”(t) = 2a_2 + 6a_3 t + 12a_4 t^2 + 20a_ t^3 x ′′(t )=2 a 2 +6 a 3 t +1 2 a 4 t 2 +2 0 a t 3
y ′ ′ ( t ) = 2 b 2 + 6 b 3 t + 12 b 4 t 2 + 20 b t 3 y”(t) = 2b_2 + 6b_3 t + 12b_4 t^2 + 20b_ t^3 y ′′(t )=2 b 2 +6 b 3 t +1 2 b 4 t 2 +2 0 b t 3
把上述方程合并成矩阵形式可以写成:
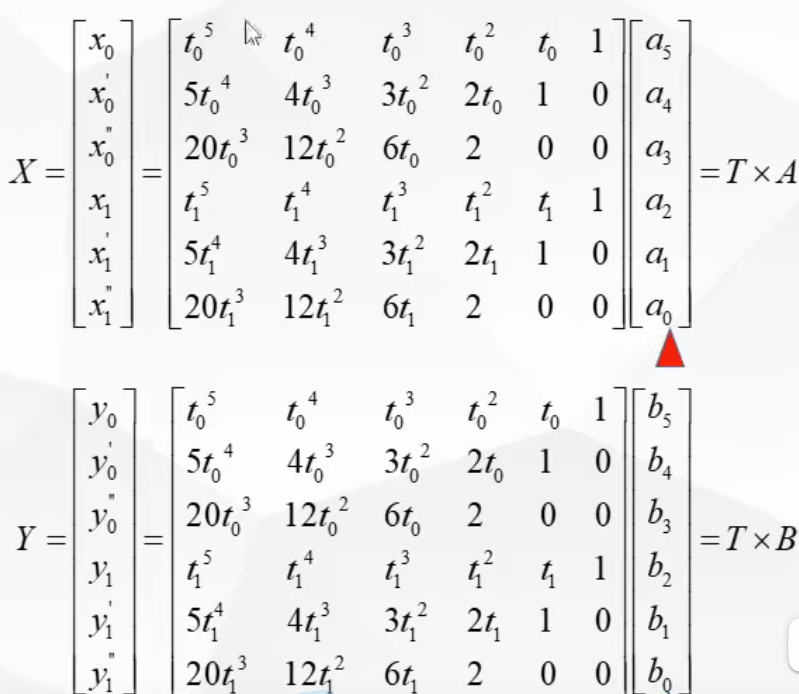

在这个等式中,X矩阵和y矩阵的数值我们都是已知的。x0,x0’,x0” 分别表示初始位置的横向坐标,速度,加速度;y0,y0’,y0” 分别表示初始位置的纵向坐标,速度,加速度。其次, 时间t0和t1也是已知的,分别表示初始位置和终点位置的时刻。这样一来 X,Y,T矩阵都已知,我们便容易求出矩阵A。
之后,我们再设置时间间隔Δt代入T矩阵,就能利用A矩阵和T矩阵求出初始位置和终点位置之间的点的位置、速度和加速度了。
更多详细讲解可以看文末的链接~
; 代码讲解
笔者通过github上的开源代码来学习五次多项式曲线,下面进行代码的讲解。
参数设置
MAX_T = 100.0
MIN_T = 5.0
sx = 10.0
sy = 10.0
syaw = np.deg2rad(10.0)
sv = 1.0
sa = 0.1
gx = 30.0
gy = -10.0
gyaw = np.deg2rad(20.0)
gv = 1.0
ga = 0.1
max_accel = 1.0
max_jerk = 0.5
dt = 0.1
构造五次多项式规划器
规划器中先采用单车模型求解出起点和终点的横向和纵向加速度、速度。
以最短运动时间和最长运动时间之间每隔Δt个时间间隔的时间为单位,求解最优路径。
求解的方式是,对于每个运动时间构造一个五次多项式曲线QuinticPolynomial,QuinticPolynomial()的目的是 求解矩阵A,以及计算位置,速度和加速度。
time, x, y, yaw, v, a, j = quintic_polynomials_planner(
sx, sy, syaw, sv, sa, gx, gy, gyaw, gv, ga, max_accel, max_jerk, dt)
def quintic_polynomials_planner(sx, sy, syaw, sv, sa, gx, gy, gyaw, gv, ga, max_accel, max_jerk, dt):
"""
quintic polynomial planner
input
s_x: start x position [m]
s_y: start y position [m]
s_yaw: start yaw angle [rad]
s_v: start speed [m/s]
sa: start accel [m/ss]
gx: goal x position [m]
gy: goal y position [m]
gyaw: goal yaw angle [rad]
ga: goal accel [m/ss]
max_accel: maximum accel [m/ss]
max_jerk: maximum jerk [m/sss]
dt: time tick [s]
return
time: time result
rx: x position result list
ry: y position result list
ryaw: yaw angle result list
rv: velocity result list
ra: accel result list
"""
vxs = sv * math.cos(syaw)
vys = sv * math.sin(syaw)
vxg = gv * math.cos(gyaw)
vyg = gv * math.sin(gyaw)
axs = sa * math.cos(syaw)
ays = sa * math.sin(syaw)
axg = ga * math.cos(gyaw)
ayg = ga * math.sin(gyaw)
time, rx, ry, ryaw, rv, ra, rj = [], [], [], [], [], [], []
for T in np.arange(MIN_T, MAX_T, MIN_T):
xqp = QuinticPolynomial(sx, vxs, axs, gx, vxg, axg, T)
yqp = QuinticPolynomial(sy, vys, ays, gy, vyg, ayg, T)
time, rx, ry, ryaw, rv, ra, rj = [], [], [], [], [], [], []
for t in np.arange(0.0, T + dt, dt):
time.append(t)
rx.append(xqp.calc_point(t))
ry.append(yqp.calc_point(t))
vx = xqp.calc_first_derivative(t)
vy = yqp.calc_first_derivative(t)
v = np.hypot(vx, vy)
yaw = math.atan2(vy, vx)
rv.append(v)
ryaw.append(yaw)
ax = xqp.calc_second_derivative(t)
ay = yqp.calc_second_derivative(t)
a = np.hypot(ax, ay)
if len(rv) >= 2 and rv[-1] - rv[-2] < 0.0:
a *= -1
ra.append(a)
jx = xqp.calc_third_derivative(t)
jy = yqp.calc_third_derivative(t)
j = np.hypot(jx, jy)
if len(ra) >= 2 and ra[-1] - ra[-2] < 0.0:
j *= -1
rj.append(j)
if max([abs(i) for i in ra]) max_accel and max([abs(i) for i in rj]) max_jerk:
print("find path!!")
break
五次多项式类
对照着上一节的T矩阵可以分别计算出位置,速度,加速度和加加速度,对应下面的calc_point,calc_first_derivative, calc_second_derivative, calc_third_derivative。
class QuinticPolynomial:
def __init__(self, xs, vxs, axs, xe, vxe, axe, time):
self.a0 = xs
self.a1 = vxs
self.a2 = axs / 2.0
A = np.array([[time ** 3, time ** 4, time ** 5],
[3 * time ** 2, 4 * time ** 3, 5 * time ** 4],
[6 * time, 12 * time ** 2, 20 * time ** 3]])
b = np.array([xe - self.a0 - self.a1 * time - self.a2 * time ** 2,
vxe - self.a1 - 2 * self.a2 * time,
axe - 2 * self.a2])
x = np.linalg.solve(A, b)
self.a3 = x[0]
self.a4 = x[1]
self.a5 = x[2]
def calc_point(self, t):
xt = self.a0 + self.a1 * t + self.a2 * t ** 2 + \
self.a3 * t ** 3 + self.a4 * t ** 4 + self.a5 * t ** 5
return xt
def calc_first_derivative(self, t):
xt = self.a1 + 2 * self.a2 * t + \
3 * self.a3 * t ** 2 + 4 * self.a4 * t ** 3 + 5 * self.a5 * t ** 4
return xt
def calc_second_derivative(self, t):
xt = 2 * self.a2 + 6 * self.a3 * t + 12 * self.a4 * t ** 2 + 20 * self.a5 * t ** 3
return xt
def calc_third_derivative(self, t):
xt = 6 * self.a3 + 24 * self.a4 * t + 60 * self.a5 * t ** 2
return xt
判断终止条件
如果该条路径上的所有点的加速度和加加速度都满足约束条件,则找到一条符合条件的路径。
if max([abs(i) for i in ra]) max_accel and max([abs(i) for i in rj]) max_jerk:
print("find path!!")
break
参考资料
https://www.bilibili.com/video/BV1dv411W77J
Original: https://blog.csdn.net/weixin_43794327/article/details/123335112
Author: TommyGong08
Title: 【路径规划】一文学懂五次多项式曲线 Quintic Polynomial
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/558638/
转载文章受原作者版权保护。转载请注明原作者出处!