

本篇在前面 的儒释道整合的基础上,尝试着描述aaas的全线的贯通,即AI开发的全栈框架(含 开发环境和运行时环境)。
大致内容在下面的语音文件中:(文件名:从最简单的初生儿级的拍地鼠游戏到超时空的宇宙级能量流)
链接:https://pan.baidu.com/s/1ZbgwEbxkS4YUvSQWxJRI2g
提取码:2g8b
大致给出了aaas系统的两端(开端和终端)以及连接两端– 两端中间的一个传动带。
- 终端:”超时空”自由格lattice
- 连接两端– 两端中间的一个传动带:”跨时空”旅行
- 开端:”拍地鼠”游戏game
从内容上,解决了有向图的全部。简单列出如下:
诠释学(基于逻辑的/正式的) 树process 程序激活activation 符号学(节点内的图嵌套) 梯度树mediator 概念激励excitation 建筑术(非正式插图的启发式) 森林 _stimuli_激励激发inspiration AI系统 _signals_信号模拟simulation _signs_训练仿真emulation
第一行给出的是procedure的一个例子–一个存储在计算机中对符号sign编码的位和字节的计算机程序,其激活函数是一个离散过程。它们表示了 紧密相连的标志集(严密组织的) –列表,层次结构和网络。
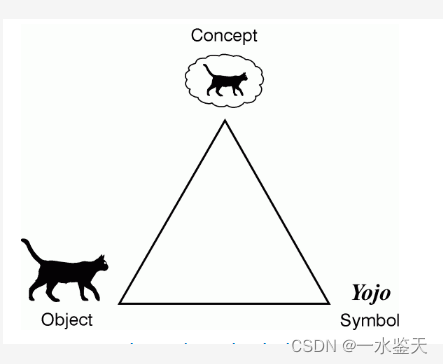
第二行直接给出乐意义三角形中的最上面的顶点–由Yojo及其周围环境反射的光线诱发的神经兴奋的印象。这种激励称为概念,是 将符号symbol与其对象object联系起来的中介mediator 。
后面三行作为一个整体给出了一个AI系统的包容性体系结构(subsumption architecture)-称为”移动机器人(mobile robots)的包容性体系结构”。它为移动机器人定义了能力水平(competence levels)–区分了八个层次的能力,每个能力都有越来越复杂的目标和实现目标的手段。
- 一个机器人robot 是一个AI系统-从环境中接收信号,并以一个帮助它实现某些已确立的目的方式作用于环境。
- 八个层次的能力:避免avoiding,徘徊wandering,探索exploring,映射mapping,注意noticing,推理reasoning,规划planning,预计anticipating。
- 这些 能力 水平 (the competence levels )中的每一个都取决于并 包含 subsumes_早期水平所达到的能力。每个级别对来自输入传感器的 _符号signs, _信号signals_或 _刺激stimuli_做出响应,并为电机机构生成输出。然而,作为一个整体的机器人并不依赖于严格的 控 制等 级(a strict control hierarchy )。前几个层次本身可以支持类昆虫智能,它可以直接响应即时投入(immediate inputs ),而不需要进行抽象的推理或计划。较高的水平可以抑制较低的水平,并控制更复杂或更智能的行为,但较低的水平仍然能够对危险信号进行自动的,反射式的反应。
表中第一列中的绿字( 树,森林和 梯度图— 其他图的节点内的图嵌套)是三种有向图。在aaas中,有向图最初用来表示意义。
这样,上面的表给出的就是不同的意义表征– 散落在程序中(计算机系统或普通程序)、人们的头脑中(AI系统或AI程序)以及概念表示法(概念系统或代理程序)中。 三者的关系:构成了意义三角形。

以上是对语音中内容的补充说明。
语音中 谈及的内容,将在后面的文章中整理。
【—-未完待续——】
Original: https://blog.csdn.net/ChuanfangChen/article/details/124651766
Author: 一水鉴天
Title: 软件智能:aaas系统的全线贯通 从最简单的“打地鼠”游戏到超时空的宇宙能流
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/557012/
转载文章受原作者版权保护。转载请注明原作者出处!