

遥感影像非监督分类及其精度评估(基于ERDAS实现)
非监督分类法
在 没有先验类别(训练区) 作为样本的条件下,即事先不知道类别特征的情况下,仅 依靠影像上不同类地物光谱信息(或纹理信息等)进行特征提取,再采用 聚类分析方法,将所有样本划分为若干个类别.这一过程也称为聚类(Clustering)。
常用方法
K-均值法(K-means algorithm)非监督分类:
首先假设图像上的目标要分为C个类别,然后计算数据空间上均匀分布的初始类别均值,最后基于最小距离法进行迭代,把所有像元聚集到”距离最小”的类别中
在K-均值算法中,每次迭代都要重新计算一次类别均值,并且用这一新的均值对像元进行再分类. 这一过程持续到每一类的变化像元数少于所规定的像元变化阈值或已经到了迭代的最多次数为止.
ISODATA法(迭代自组织法)非监督分类:
先计算数据空间上均匀分布的初始类别均值,然后用最短距离技术进行迭代,把它们聚集到最近的类中。
在ISODATA算法中,不是每调整一个样本的类别就重新计算一次各类样本的均值,而是每次把所有样本都调整一次各类样本的均值,并且用这一新的均值对像元进行再分类。除非限定了标准差和距离的阈值(这时,如果一些像元不满足选择的标准,它们就不参与分类),否则所有像元都被归并到与其最邻近的类别中.这一过程持续到每一类的变化像元数少于所规定的像元变化阈值或已经到了迭代的最多次数为止。
ISODATA允许用户设置聚类数(clusters)的区间,而不是一个固定的类别数,这是因为Isodata算法可以在迭代之间执行集群删除、分割和合并。
ISODATA法与K均值的差异:
- ISODATA不是每调整一个样本的类别就重新计算一次各类样本的均值,而是每次把所有样本都调整完毕之后才重新计算一次各类样本的均值(这两种方法中,前者称为逐个样本修正法,后者称为成批样本修正法)
- ISODATA法不仅可以通过调整样本所属类别来完成样本的聚类分析,而且可以自动地进行类别的”合并”和”分裂”,从而得到类数比较合理的聚类结果。
使用ERDAS对特征地物进行非监督分类
图像选取及下载
在地理空间信息云下载遥感影像,选取的遥感影像云量尽量在百分之五以下,避免云层对分类结果的干扰。
图像增强
此次选取建设用地作为特征地物进行研究,经查阅资料得知,建设用地在中红外波段和红波段更便于识别,由于人眼对绿色更加敏感,所以采取红+中红外+蓝(即462波段)分别赋予红绿蓝进行显示,之后进行图像增强处理,采取两种方案进行图像增强处理,以此评估哪一种增强方案更利于目标地物的提取:
- 首先进行基于HIS变换的图像融合,再进行边缘增强处理;
- 首先进行基于K-L变换的影像融合,再进行锐化增强(Crisp Enhacement)。
图像融合可以提高影像的分辨率,边缘增强和锐化增强可以更好的凸显道路这种线要素,便于之后进行影像的判读和非监督分类。
IHS图像融合+边缘增强
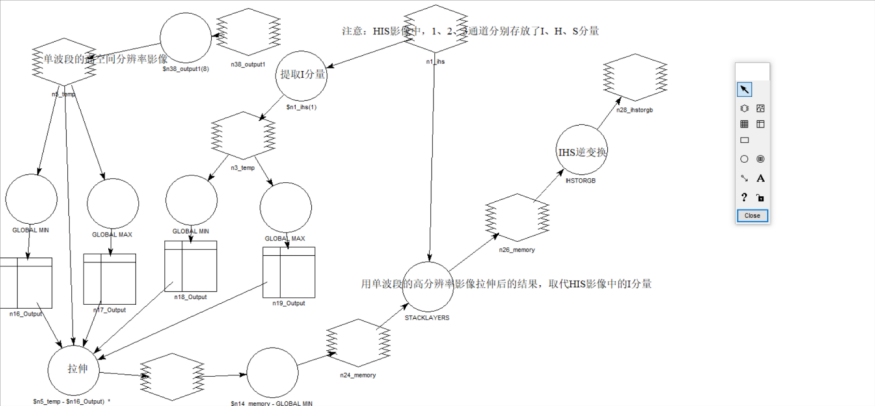
首先使用Raster–>Spectral–>RGB to IHS工具得到遥感影像的IHS影像。


再使用以下model进行图像融合,将分辨率为15m全色波段(BAND8)
拉伸并替换IHS影像的I分量即可得到15m分辨率的影像,model和生成后的影像如下:

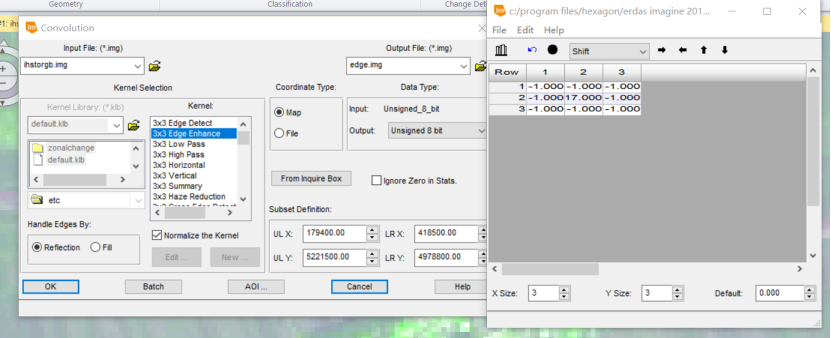
对处理后的图像和原图像使用swipe工具进行对比,显然处理之后的图像对道路的显示效果更好。之后采用Raster–>Spatial–>Convolution进行边缘增强,算子和结果如下:
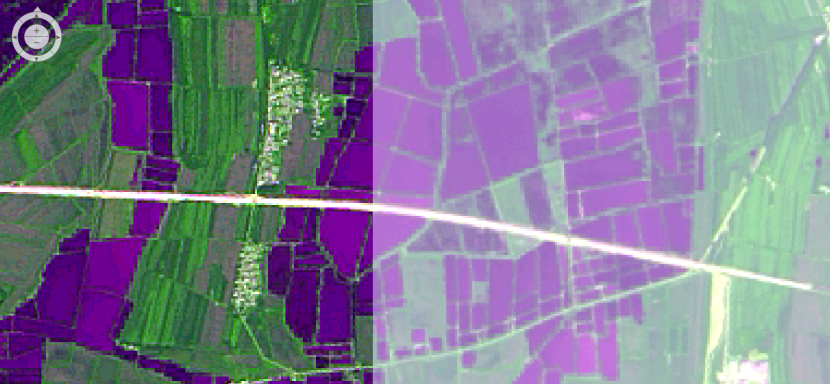
显然,图像的显示效果更好。
; K-L变换+锐化增强
绘制以下model实现K-L变换,或使用Raster–>Pan Sharpen–>Resolution Merge详细内容见关键过程数据中的KL变换.gmd文件,得到的图像如下,并与原图像做swipe对比:
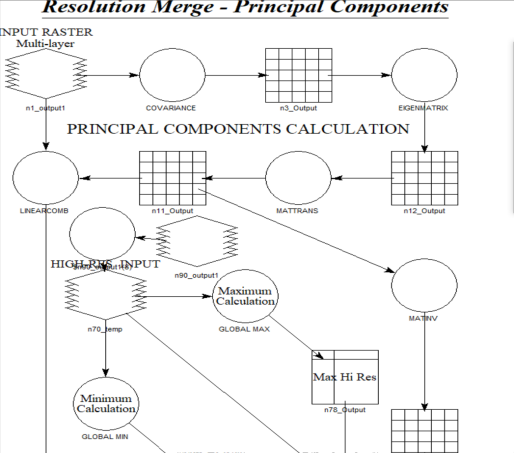

显然图像的显示效果更好,KL变换可以提高影像的分辨率,K-L变换的第一主成分几乎包含了原来各波段图像信息的绝大部分(一般在80%以上),用全色波段15m替换K-L变换的第一主分量,使得遥感图像的精度得到提升。
使用Raster–>Spatial–>Crisp工具进行锐化增强,得到的结果如下:
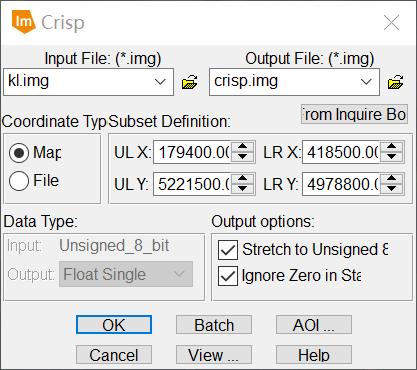

左右分别为锐化处理后和之前的影像,使用swipe对比明显增加了显示效果。
非监督分类及类别判别
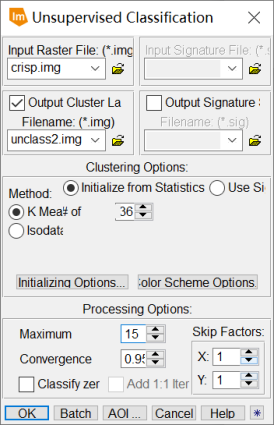
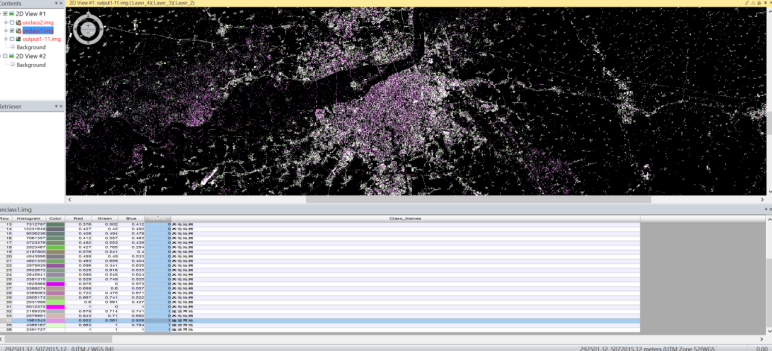
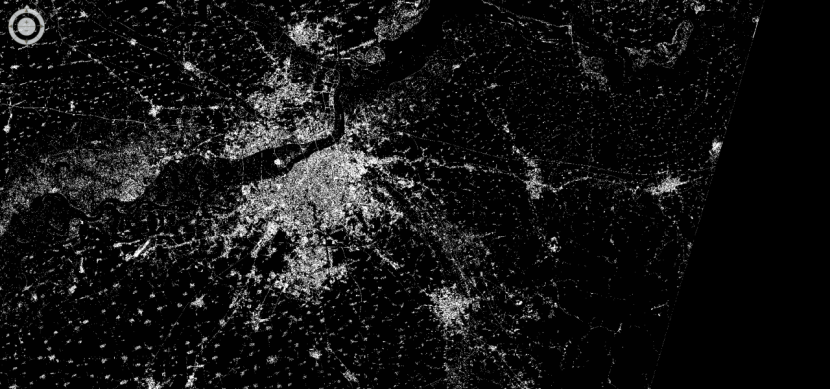
使用Raster–>Unsupervised–>Unsupervised Classification工具将两幅增强影像进行非监督分类,将影像和原图像叠加,打开分类影像的属性表,右键Opacity字段,使用formula工具将不透明度设为0,再分别对单个类别设置不透明度,观察其在遥感影像的显示来设置其类别,非监督分类的设置以及产生的图像如下:

四、分类后处理
使用Raster–>Thematic–>Clump工具进行聚类分析,使用Sieve或Eliminate进行过滤或去除分析,用来合并分类后产生的小图斑。后处理后结果如下:
方案一的Eliminate处理后的结果图:
方案二的Eliminate处理后的结果图:
; 分类精度评价
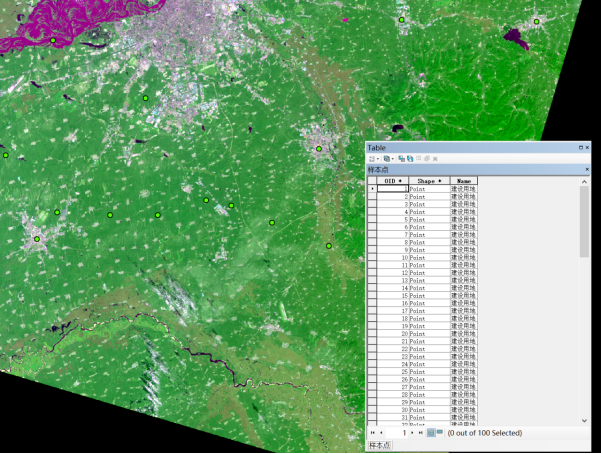
使用Arcgis绘制样本点
在Arcgis中导入原始图像,首先使用绘图工具绘制一个采样点,再使用图形转要素从而生成点要素,这样避免了坐标系不一致的问题。打开编辑器开始编辑,绘制100个采样点,其中目标地物(建设用地)50个,非目标地物50个,可以使用字段计算器批量的赋予属性。绘制的样本点如下:
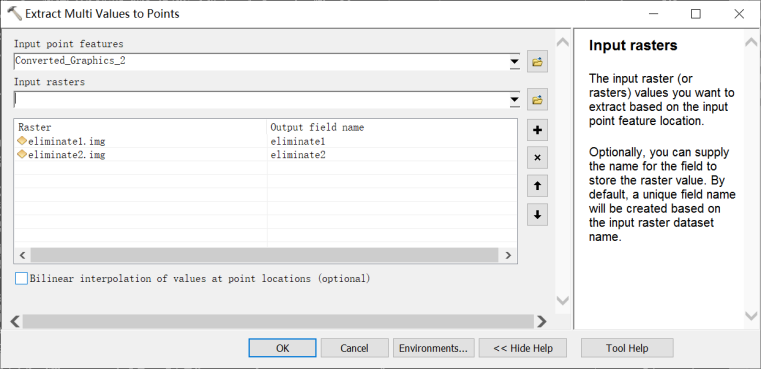
; 提取分类后属性至样本点
在Arcgis中使用多值提取至点工具,将分类后的图像的属性值赋给点要素,然后统计这些点要素的分类结果,分类重编码的时候已经将所有目标地类归入2属性值中,归纳统计即可得到Kappa系数,借此可以评估两种分类方法的效果。
计算Kappa指数
通过统计分类后的样本点属性和真实的样本点属性,可以通过计算Kappa系数来评估分类精度,Kappa系数的计算方式如下:
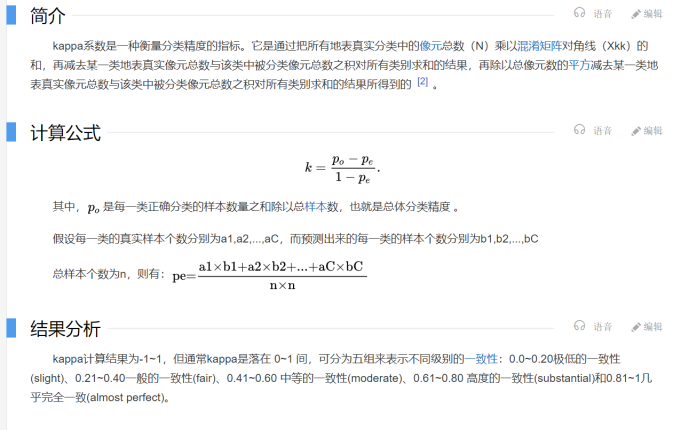
计算出的Kappa系数如下图:
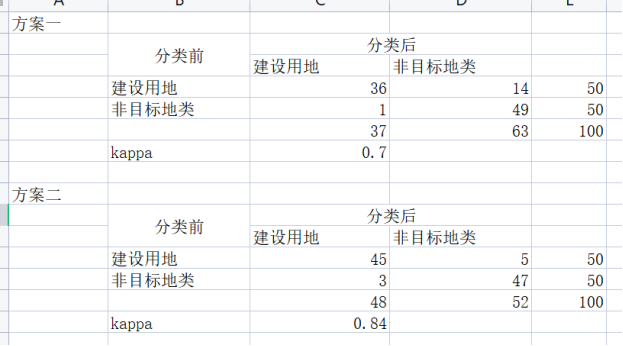
由Kappa系数大小可知,当Kappa系数接近于1,分类准确率越高,由上表可知,采用方案二即使用K-L变换+锐化增强的方法分类精度更高。
Original: https://blog.csdn.net/qq_52481939/article/details/122030834
Author: /:Control
Title: 遥感影像非监督分类及其精度评估(基于ERDAS实现)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/550200/
转载文章受原作者版权保护。转载请注明原作者出处!