

深入理解NLP中LayerNorm的原理以及LN的代码详解
在介绍LayerNorm之前,我们先来思考一下,为什么NLP中要引入LayerNorm?
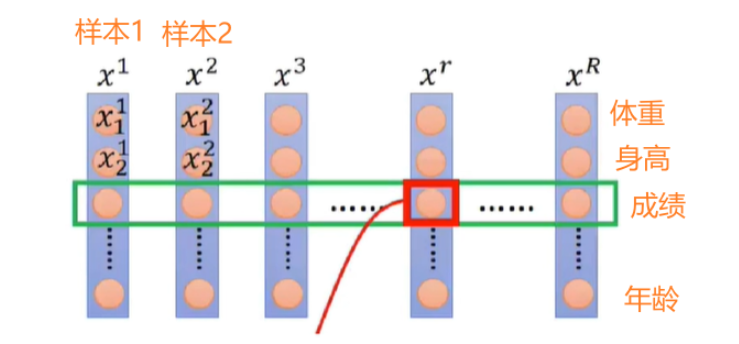
如果你学过一点深度学习,那么应该多多少少听过BatchNorm这个东西。BN简单来说就是对一批样本按照每个特征维度进行归一化。BN具体细节请看我的另一篇博客:深入理解BatchNorm的原理
以下图为例演示下BatchNorm的过程,我们会对R个样本的”成绩”这个特征维度做归一化。

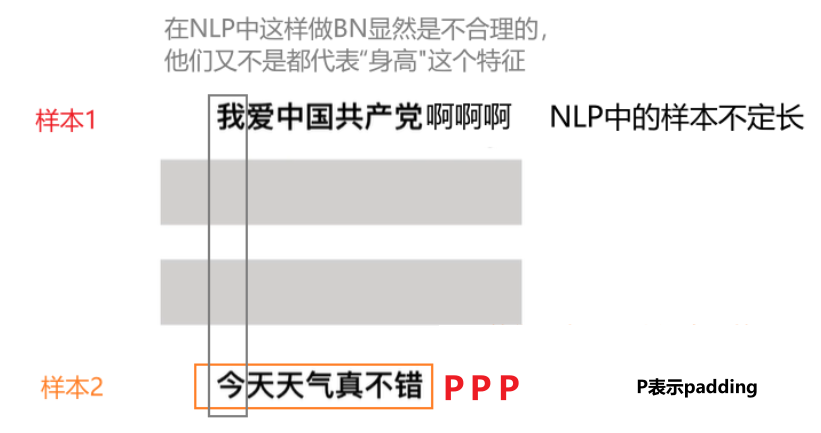
但在NLP领域,每个样本通常是一个句子,而句子中包含若干个单词。这时如果使用BN去做过归一化通常效果会很差。
那有没有更好的归一化方法呢?
有的,我们今天就来看一看NLP中常用的归一化操作:LayerNorm
; LayerNorm原理
在NLP中,大多数情况下大家都是用LN(LayerNorm)而不是BN(BatchNorm)。最直接的原因是BN在NLP中效果很差,所以一般不用。
论文题目:Layer Normalization
论文链接:https://arxiv.org/abs/1607.06450
官方文档:torch.nn.LayerNorm
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
- Input:( N , ∗ ) (N, *)(N ,∗)
- Output:( N , ∗ ) (N, *)(N ,∗)(same shape as input)
LayerNorm中没有batch的概念,所以不会像BatchNorm那样跟踪统计全局的均值方差,因此train()和eval()对LayerNorm没有影响。
; 说明:nn.LayerNorm与nn.BatchNorm用法上有很大的差异
- nn.BatchNorm2d(num_features)中的
num_features一般是输入数据的第2维(从1开始数), BatchNorm中weight和bias与num_features一致。 - nn.LayerNorm(normalized_shape)中的
normalized_shape是最后的几维, LayerNorm中weight和bias的shape就是传入的normalized_shape。
在取平均值和方差的时候两者也有差异:
- BN是把 除了轴num_features外的所有轴的元素放在一起,取平均值和方差的,然后对每个元素进行归一化,最后再乘以对应的γ \gamma γ和β \beta β( 共享)。 BN共有num_features个mean和var,(假设输入数据的维度为(N,num_features, H, W))。
- 而LN是把 normalized_shape这几个轴的元素都放在一起,取平均值和方差的,然后对每个元素进行归一化,最后再乘以对应的γ \gamma γ和β \beta β( 每个元素不同)。 LN共有N1*N2个mean和var(假设输入数据的维度为(N1,N2,normalized_shape),normalized_shape表示多个维度)

示例1:NLP中的LayerNorm(常用)
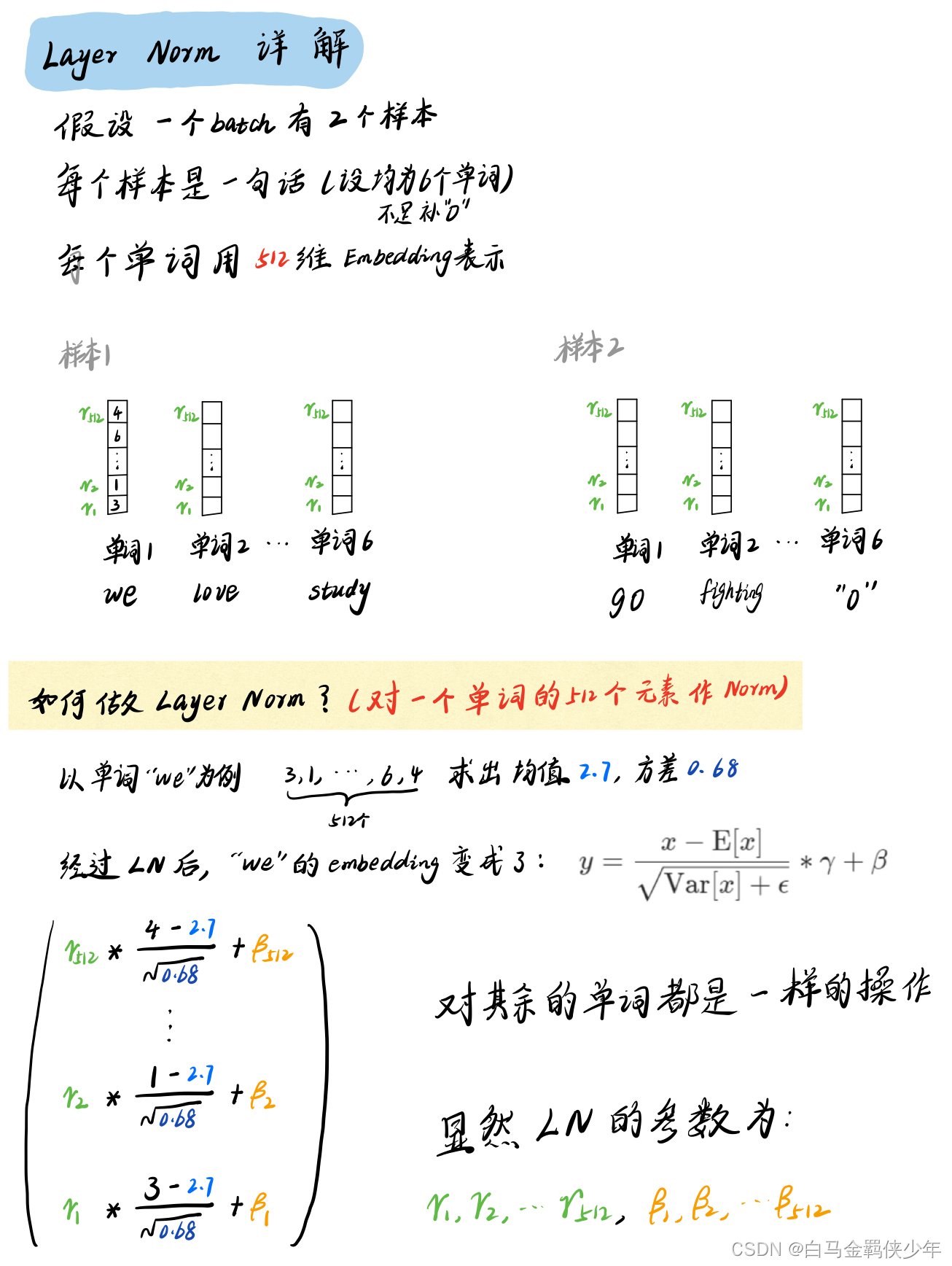
NLP的输入一般是(batch, sentence_length, embedding_dim),则LayerNorm层有embedding_dim个参数γ \gamma γ和β \beta β。也就是对于输入的单词序列,LN是对一个单词的embedding向量进行归一化的
import torch
import torch.nn as nn
batch, sentence_length, embedding_dim = 20, 5, 10
inputs = torch.randn(batch, sentence_length, embedding_dim)
layer_norm = nn.LayerNorm(embedding_dim)
print("LayerNorm只有参数gamma和beta,没有统计量")
print(layer_norm.state_dict().keys())
print("参数gamma shape: ", layer_norm.state_dict()['weight'].shape)
print("参数beta shape: ", layer_norm.state_dict()['bias'].shape)
print("输入:", inputs.shape)
print("输出:", layer_norm(inputs).shape)
输出:
LayerNorm只有参数gamma和beta,没有统计量
odict_keys(['weight', 'bias'])
参数gamma shape: torch.Size([10])
参数beta shape: torch.Size([10])
输入: torch.Size([20, 5, 10])
输出: torch.Size([20, 5, 10])
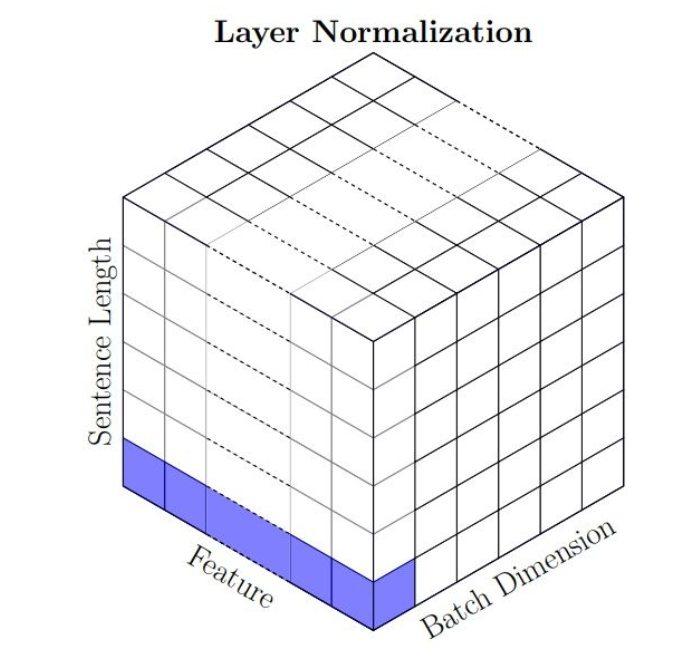
图解:🤩Layer Norm到底是怎么对单词归一化的?
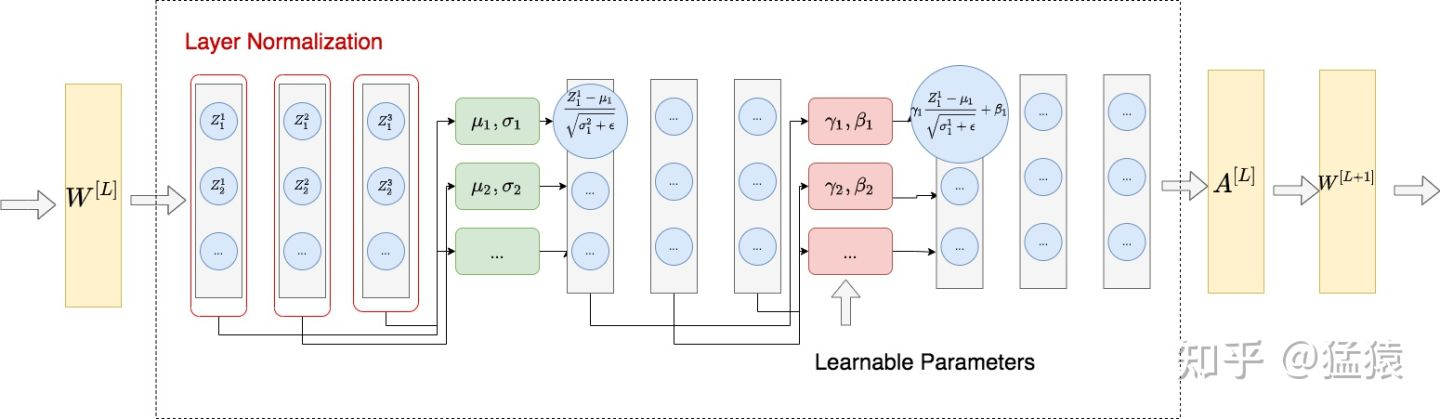
(有错误)下图Layer Normalization计算过程(来自猛猿),乍一看好像是在描述LayerNorm,但是对应到NLP中的数据,就不太正确了,所以建议结合我上面的图去理解。
; 思考题1:为什么Layer Norm是对每个单词的Embedding做归一化?
看到这,可能很多人会有疑问了,为什么Layer Norm是对每个单词的embedding进行归一化,而不是对这个序列的所有单词embedding向量的相同维度进行归一化呢?
我一开始也是觉得应该对所有单词embedding向量归一化,但后来发现pytorch官方实现的LayerNorm并不是这样实现的,而是对每个单词的embedding进行了归一化。
后来,我想明白了,因为每个序列(每个样本)的单词个数不一样,但在代码实现的时候会进行padding,比如一个序列原始单词数为30个,另一个序列原始单词数是8,然后你统一padding成了30个单词,那如果按照相同维度,进行归一化,norm的信息就会被无意义的padding的embedding冲淡的!这显然是不合理的。
思考题2:为什么BN训练和测试时有区别,而LN没区别?
BatchNorm的统计量是一个batch算出来的,在线测试时,不太可能累计一个batch资料后再进行测试的。所以在训练的时候要记录统计量running mean和running var,作为预测时的均值和方差。详见博客:深入理解BatchNorm的原理
而LayerNorm训练和测试的时候不需要model.train()和model.eval(),是因为它只针对一个样本,不是针对一个batch,所以LayerNorm只有参数gamma和beta,没有统计量,因此LN训练和预测没有区别。
Transformer模型中的LayerNorm
class PoswiseFeedForwardNet(nn.Module):
def __init__(self):
super(PoswiseFeedForwardNet, self).__init__()
self.fc = nn.Sequential(
nn.Linear(d_model, d_ff, bias=False),
nn.ReLU(),
nn.Linear(d_ff, d_model, bias=False)
)
def forward(self, inputs):
"""
inputs: [batch_size, seq_len, d_model]
"""
residual = inputs
output = self.fc(inputs)
return nn.LayerNorm(d_model).to(device)(output + residual)
示例2:CV中LayerNorm的应用(不常用)
import torch
import torch.nn as nn
print("===== Image Example =====")
N, C, H, W = 20, 5, 10, 10
inputs = torch.randn(N, C, H, W)
layer_norm = nn.LayerNorm([C, H, W])
print("LayerNorm只有参数gamma和beta,没有统计量")
print(layer_norm.state_dict().keys())
print("参数gamma shape: ", layer_norm.state_dict()['weight'].shape)
print("参数beta shape: ", layer_norm.state_dict()['bias'].shape)
print("输入:", inputs.shape)
print("输出:", layer_norm(inputs).shape)
输出:
===== Image Example =====
LayerNorm只有参数gamma和beta,没有统计量
odict_keys(['weight', 'bias'])
参数gamma shape: torch.Size([5, 10, 10])
参数beta shape: torch.Size([5, 10, 10])
输入: torch.Size([20, 5, 10, 10])
输出: torch.Size([20, 5, 10, 10])
下面这个图C表示通道数,H,W表示高和宽,由于可视化的原因,下图把H,W放在一起了,实际上像下图 橙色形状是一个特征图(某个通道下的H*W)
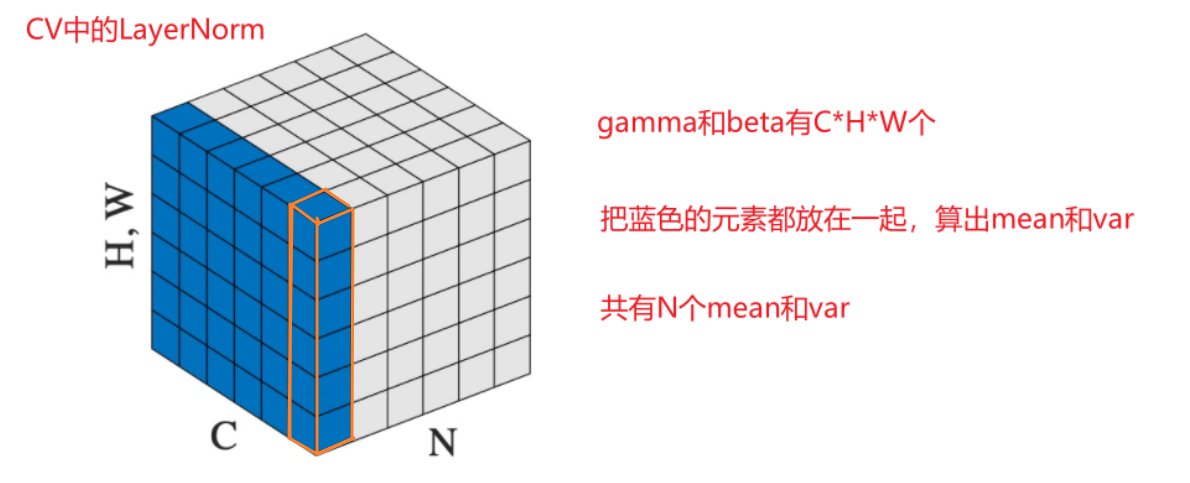
显然LN求mean和var的时候是把整个蓝色元素都放在一起求的,然后每个元素都用这个mean和var进行归一化,不过这里每个元素对应的γ \gamma γ和β \beta β是不同的,因为γ \gamma γ和β \beta β也有C ∗ H ∗ W CHW C ∗H ∗W个。
附:BN、LN、IN、GN的区别
神经网络中有很多归一化的算法:Batch Normalization (BN)、Layer Normalization (LN)、Instance Normalization (IN)、Group Normalization (GN)
他们的公式都是差不多的,就是 减去均值,除以标准差,再施以线性映射。(只不过在对哪些维度求均值、方差,以及参数γ \gamma γ和β \beta β怎么对应有差异)
下图来自何凯明的论文:https://arxiv.org/pdf/1803.08494.pdf
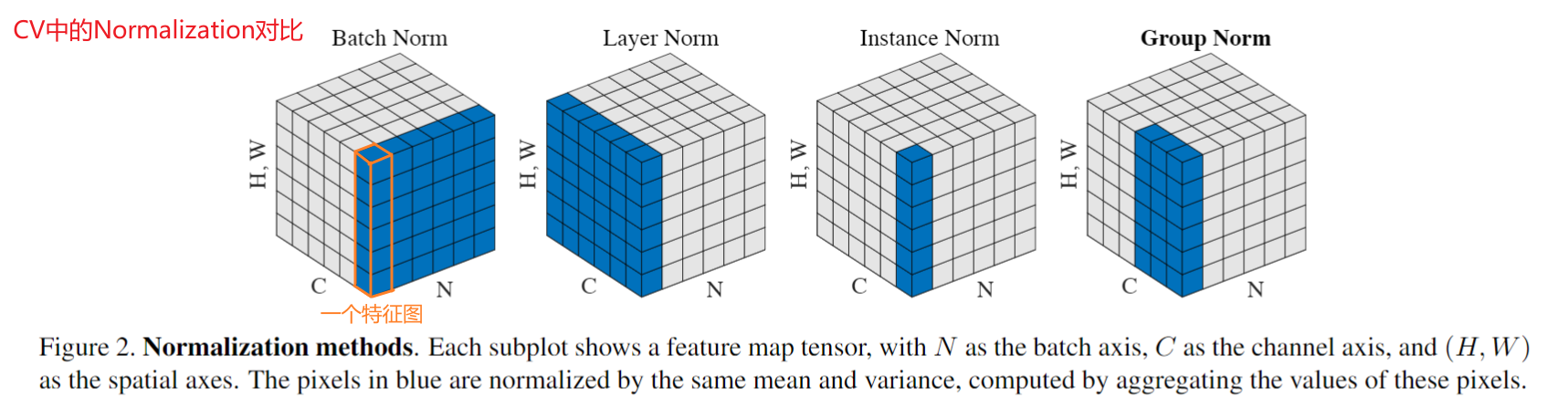
对于每一种Norm方法而言, 每个像蓝色这样的区域会计算出一个均值和方差,在这个蓝色区域内的元素都会用这个均值和方差进行归一化。至于线性映射时参数γ \gamma γ和β \beta β怎么对应不同Norm时有差异的,我前面提到过BN和LN在这点上的差异。
下面这个例子来自博客:BatchNormalization、LayerNormalization、InstanceNorm、GroupNorm简介,我觉得举的例子很形象,就摘过来了。
计算机视觉(CV)领域的数据x x x一般是4维形式,如果把x ∈ R N × C × H × W x \in \mathbb{R}^{N \times C \times H \times W}x ∈R N ×C ×H ×W类比为一摞书,这摞书总共有 N 本,每本有 C 页,每页有 H 行,每行 W 个字符。
计算均值时
- BN 相当于把这些书按页码一一对应地加起来(例如:第1本书第36页,加第2本书第36页…),再除以每个页码下的字符总数:N×H×W,因此可以把 BN 看成求”平均书”的操作(注意这个”平均书”每页只有一个字)
- LN 相当于把每一本书的所有字加起来,再除以这本书的字符总数:C×H×W,即求整本书的”平均字”
- IN 相当于把一页书中所有字加起来,再除以该页的总字数:H×W,即求每页书的”平均字”
- GN 相当于把一本 C 页的书平均分成 G 份,每份成为有 C/G 页的小册子,对这个 C/G 页的小册子,求每个小册子的”平均字”
计算方差同理
此外,还需要注意它们的映射参数γ和β的区别:对于 BN,IN,GN, 其γ和β都是维度等于通道数 C 的向量。而对于 LN,其γ和β都是维度等于 normalized_shape 的矩阵。
最后,BN和IN 可以设置参数:momentum 和 track_running_stats来获得在全局数据上更准确的 running mean 和 running std。而 LN 和 GN 只能计算当前 batch 内数据的真实均值和标准差。
; 参考资料
[1] BatchNormalization、LayerNormalization、InstanceNorm、GroupNorm简介
[2] pytorch LayerNorm参数详解,计算过程
[3] PyTorch学习之归一化层(BatchNorm、LayerNorm、InstanceNorm、GroupNorm)
[4] BatchNorm详解:深入理解BatchNorm的原理、代码实现以及BN在CNN中的应用
[5] 深度神经网络架构【斯坦福21秋季:实用机器学习中文版】
写在最后
✨原创不易,还希望各位大佬支持一下 \textcolor{blue}{原创不易,还希望各位大佬支持一下}原创不易,还希望各位大佬支持一下
👍 点赞,你的认可是我创作的动力! \textcolor{green}{点赞,你的认可是我创作的动力!}点赞,你的认可是我创作的动力!
⭐️ 收藏,你的青睐是我努力的方向! \textcolor{green}{收藏,你的青睐是我努力的方向!}收藏,你的青睐是我努力的方向!
✏️ 评论,你的意见是我进步的财富! \textcolor{green}{评论,你的意见是我进步的财富!}评论,你的意见是我进步的财富!
Original: https://blog.csdn.net/qq_43827595/article/details/121877901
Author: 白马金羁侠少年
Title: 深入理解NLP中LayerNorm的原理以及LN的代码详解
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/548810/
转载文章受原作者版权保护。转载请注明原作者出处!