

手上没有什么教材,都是听网课自学,好多东西都是学了忘忘了翻笔记,心里想着不如记一些电子笔记。纸质笔记不会全部搬运,这篇文章随缘记一些有意思的神经网络知识。
1 反向传播
1.1 概念理解
反向传播( Backpropagation)是什么先不谈,它的作用就是一点:使 Gradient Descent的计算更快速。
首先,梯度下降的计算过程如下:
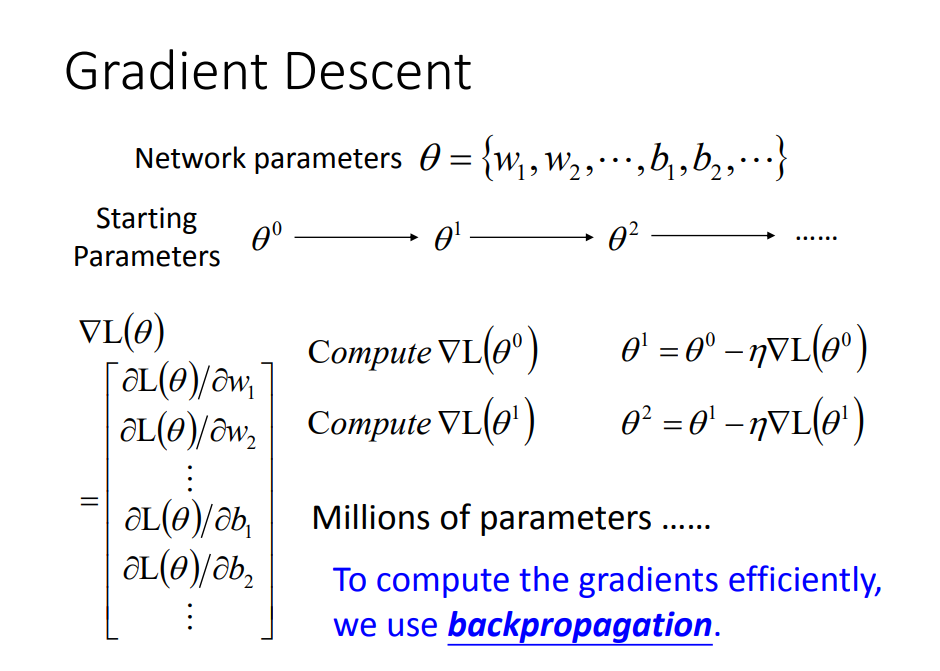

在计算过程中,类似下面的计算组成了计算的核心部分。
∂ L ( θ ) / ∂ w 1 \partial L(\theta) / \partial w_1 ∂L (θ)/∂w 1
如果不往深的想,可能这就是一个公式。但是这个公式的计算过程,正是反向传播优化的地方。
首先补充一下高数的链式法则:

我们把 L ( θ ) L(\theta)L (θ) 用 C n C^n C n 代替:
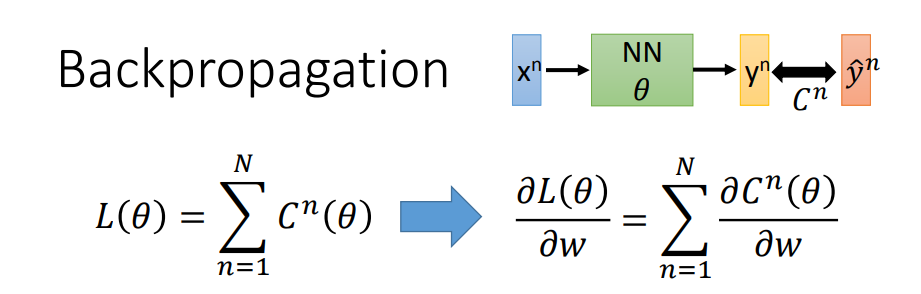
这样,公式的计算核心就转移到了下面这个公式上:∂ C / ∂ w \partial C / \partial w ∂C /∂w
根据链式法则:
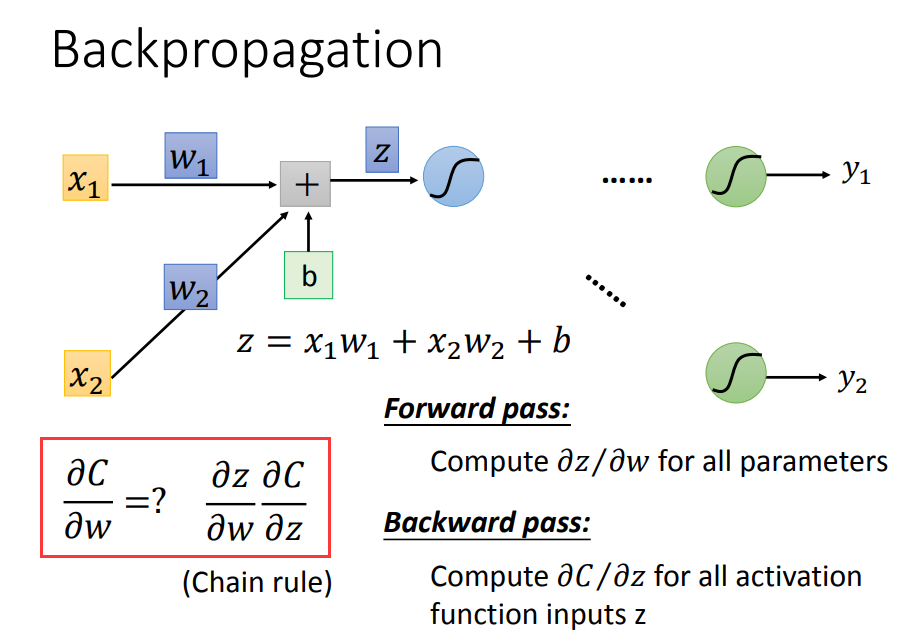
计算
z对 w的偏导很简单,因为z = x1w1+ x2w2 + b。
但是计算
C对 z的偏导就很麻烦了。因为 C是最后的 output layer与标准答案的 Loss,这一项很难计算。所以还得对这一项进行拆解(使用链式法则):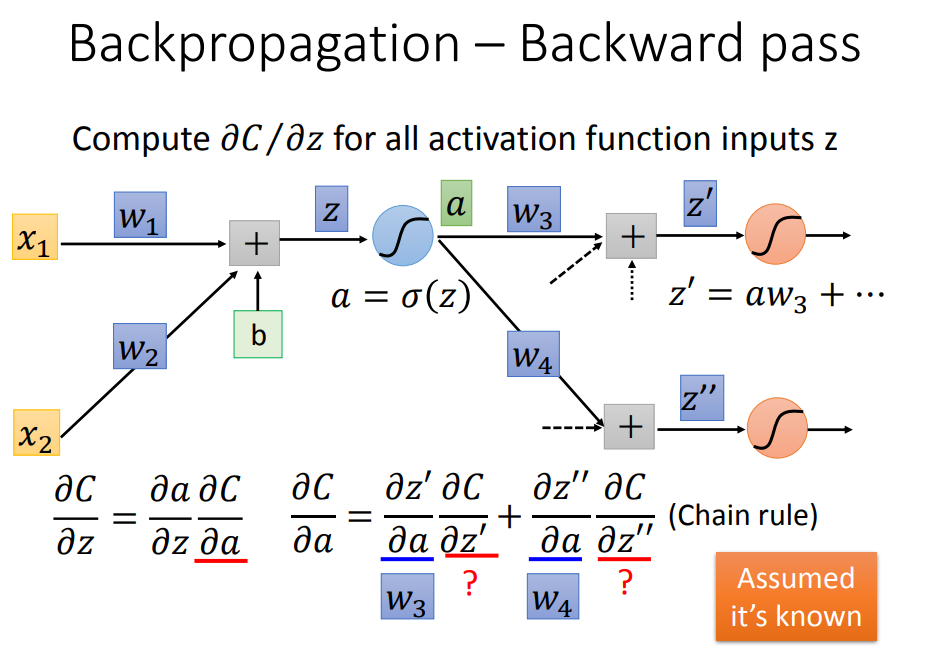
拆解完
C对 z的偏导,我们发现永远都是拆完后的第二项偏导很难算。这样我们就得反复拆下去,直到 output layer。
对于输出层,这个第二项就很好算了,
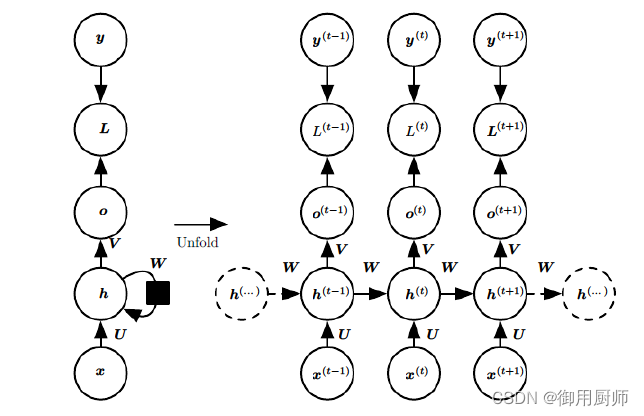
y就是 output layer的输出值, C就是选一个 Loss函数将 y和标准答案做运算。这些对于前面的神经元来说计算起来很麻烦,得算到最后一步。如果我们从前往后求偏导,那每次都得从后往前推一次。既然这样我们不如建一个反向的神经网络,负责去计算每一次的第二项偏导值,且只计算一次。这就是反向传播的精髓所在。
下面两张图是一个神经元的反向,和整个网络的反向:
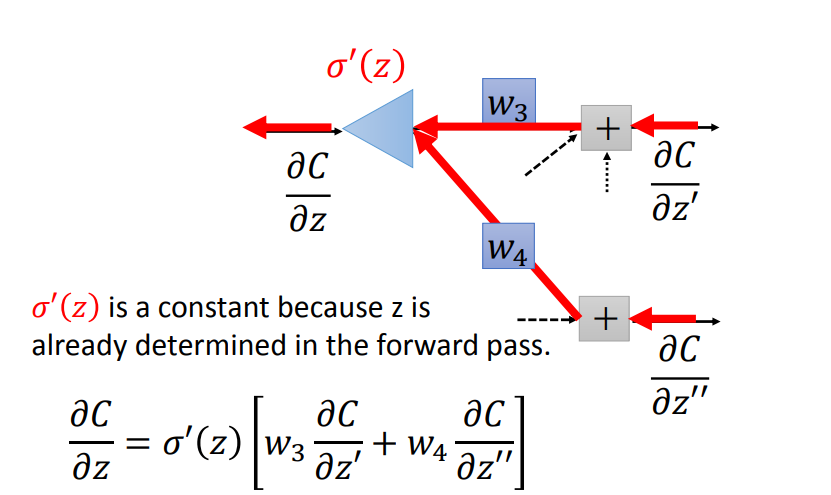
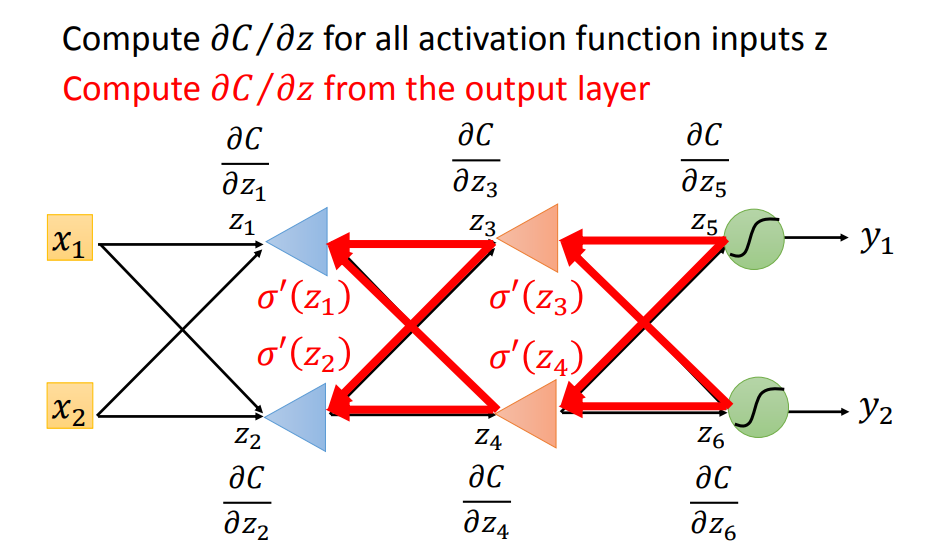
反向传播能够使梯度的计算更快,就是这样一个原理了。
本小节课件参考:李宏毅2020机器学习
; 1.2 举例
1.2.1 例1(摘自文章推荐2)
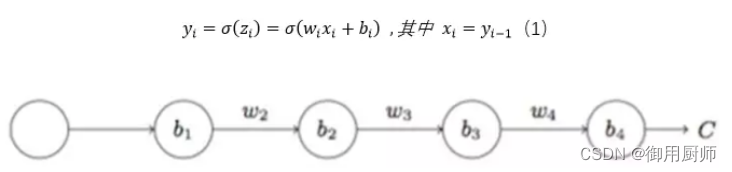
上图为网络的前向传播过程及其公式,现在求:∂ C ∂ w 1 \frac{\partial C}{\partial w_1}∂w 1 ∂C
因为
C一般代表 loss,所以会先有:∂ C ∂ w 1 = ∂ C ∂ y 4 ∂ y 4 ∂ w 1 \frac{\partial C}{\partial w_1} = \frac{\partial C}{\partial y_4}\frac{\partial y_4}{\partial w_1}∂w 1 ∂C =∂y 4 ∂C ∂w 1 ∂y 4 剩下的就按照图,从后往前写:
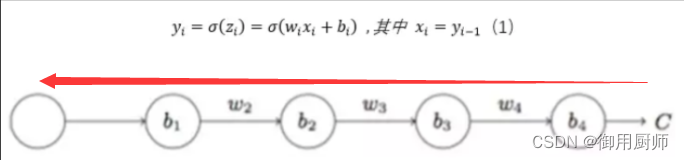
∂ C ∂ w 1 = ∂ C ∂ y 4 ∂ y 4 ∂ z 4 ∂ z 4 ∂ x 4 ∂ x 4 ∂ z 3 ∂ z 3 ∂ x 3 ∂ x 3 ∂ z 2 ∂ z 2 ∂ x 2 ∂ x 2 ∂ z 1 ∂ z 1 ∂ w 1 \frac{\partial C}{\partial w_1} = \frac{\partial C}{\partial y_4}\frac{\partial y_4}{\partial z_4}\frac{\partial z_4}{\partial x_4}\frac{\partial x_4}{\partial z_3}\frac{\partial z_3}{\partial x_3}\frac{\partial x_3}{\partial z_2}\frac{\partial z_2}{\partial x_2}\frac{\partial x_2}{\partial z_1}\frac{\partial z_1}{\partial w_1}∂w 1 ∂C =∂y 4 ∂C ∂z 4 ∂y 4 ∂x 4 ∂z 4 ∂z 3 ∂x 4 ∂x 3 ∂z 3 ∂z 2 ∂x 3 ∂x 2 ∂z 2 ∂z 1 ∂x 2 ∂w 1 ∂z 1
下标更整齐一些的话,可以把y4改成x5。
按照链式法则展开成上面这样,除了
C对y4的偏导(因为这个取决于 output和 label到底用了什么 loss函数),其他每一项就都是可以求解了:∂ C ∂ w 1 = ∂ C ∂ y 4 σ ′ ( z 4 ) w 4 σ ′ ( z 3 ) w 3 σ ′ ( z 2 ) w 2 σ ′ ( z 1 ) x 1 \frac{\partial C}{\partial w_1} = \frac{\partial C}{\partial y_4} \sigma'(z_4)w_4\sigma'(z_3)w_3\sigma'(z_2)w_2\sigma'(z_1)x_1 ∂w 1 ∂C =∂y 4 ∂C σ′(z 4 )w 4 σ′(z 3 )w 3 σ′(z 2 )w 2 σ′(z 1 )x 1
同理,如果要求:∂ C ∂ b 1 \frac{\partial C}{\partial b_1}∂b 1 ∂C
则:
∂ C ∂ b 1 = ∂ C ∂ y 4 ∂ y 4 ∂ z 4 ∂ z 4 ∂ x 4 ∂ x 4 ∂ z 3 ∂ z 3 ∂ x 3 ∂ x 3 ∂ z 2 ∂ z 2 ∂ x 2 ∂ x 2 ∂ z 1 ∂ z 1 ∂ b 1 \frac{\partial C}{\partial b_1} = \frac{\partial C}{\partial y_4}\frac{\partial y_4}{\partial z_4}\frac{\partial z_4}{\partial x_4}\frac{\partial x_4}{\partial z_3}\frac{\partial z_3}{\partial x_3}\frac{\partial x_3}{\partial z_2}\frac{\partial z_2}{\partial x_2}\frac{\partial x_2}{\partial z_1}\frac{\partial z_1}{\partial b_1}∂b 1 ∂C =∂y 4 ∂C ∂z 4 ∂y 4 ∂x 4 ∂z 4 ∂z 3 ∂x 4 ∂x 3 ∂z 3 ∂z 2 ∂x 3 ∂x 2 ∂z 2 ∂z 1 ∂x 2 ∂b 1 ∂z 1
最终:
∂ C ∂ b 1 = ∂ C ∂ y 4 σ ′ ( z 4 ) w 4 σ ′ ( z 3 ) w 3 σ ′ ( z 2 ) w 2 σ ′ ( z 1 ) \frac{\partial C}{\partial b_1} = \frac{\partial C}{\partial y_4} \sigma'(z_4)w_4\sigma'(z_3)w_3\sigma'(z_2)w_2\sigma'(z_1)∂b 1 ∂C =∂y 4 ∂C σ′(z 4 )w 4 σ′(z 3 )w 3 σ′(z 2 )w 2 σ′(z 1 )
; 1.2.2 例2 BPTT(摘自文章推荐1)
BPTT(back-propagation through time)是 RNN的训练方法,看到 BP就知道本质还是反向传播,只不过 RNN处理的是时间序列的数据,所以要随时间反向传播。
对标准 RNN来说,这是一个前向传播过程。具体的前向传播过程自行查阅链接。
在1.2.1的例子中,前向传播就只是1.2.2例子中的某一列(代表一个时刻)从下往上的过程,损失函数Loss也自然就是一个时刻的反向传播过程。而1.2.2每一个时刻的Loss,需要追溯这一时刻前所有时刻的信息,即:(以L(t)对W求偏导为例)
∂ L ( t ) ∂ W = ∑ k = 1 t . . . \frac{\partial L^{(t)}}{\partial W} = \sum_{k=1}^t …∂W ∂L (t )=k =1 ∑t …
而1.2.2例子的总Loss,即为:
L = ∑ t = 1 n L ( t ) L = \sum_{t=1}^nL^{(t)}L =t =1 ∑n L (t )
举个栗子:
如果要求在第三个时刻 L对 W的偏导,即:
∂ L ( 3 ) ∂ W \frac{\partial L^{(3)}}{\partial W}∂W ∂L (3 )
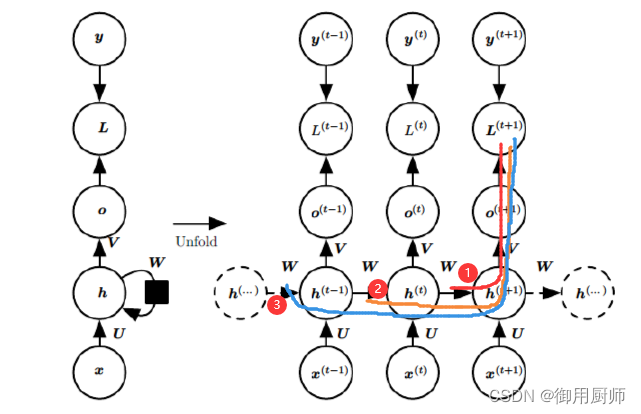
L(3) 不仅会影响 h(t) 到 h(t+1) 的
W,前面两个 W也会影响,这就是和上一个例子最大的区别。我们按照上图的①②③可以写出:
∂ L ( 3 ) ∂ W = ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ W + ∂ L ( 3 ) ∂ o ( 3 ) ∂ o ( 3 ) ∂ h ( 3 ) ∂ h ( 3 ) ∂ h ( 2 ) ∂ h ( 2 ) ∂ h ( 1 ) ∂ h ( 1 ) ∂ W \frac{\partial L^{(3)}}{\partial W} = \frac{\partial L^{(3)}}{\partial o^{(3)}}\frac{\partial o^{(3)}}{\partial h^{(3)}}\frac{\partial h^{(3)}}{\partial W} + \frac{\partial L^{(3)}}{\partial o^{(3)}}\frac{\partial o^{(3)}}{\partial h^{(3)}}\frac{\partial h^{(3)}}{\partial h^{(2)}} \frac{\partial h^{(2)}}{\partial W} + \frac{\partial L^{(3)}}{\partial o^{(3)}}\frac{\partial o^{(3)}}{\partial h^{(3)}}\frac{\partial h^{(3)}}{\partial h^{(2)}}\frac{\partial h^{(2)}}{\partial h^{(1)}} \frac{\partial h^{(1)}}{\partial W}∂W ∂L (3 )=∂o (3 )∂L (3 )∂h (3 )∂o (3 )∂W ∂h (3 )+∂o (3 )∂L (3 )∂h (3 )∂o (3 )∂h (2 )∂h (3 )∂W ∂h (2 )+∂o (3 )∂L (3 )∂h (3 )∂o (3 )∂h (2 )∂h (3 )∂h (1 )∂h (2 )∂W ∂h (1 )
把每一个L(t)(t从1~n)表示出来,最后累加,这个偏导就求出来了。
题外话:
这样的偏导既包含了空间信息,也包含了时间信息,因此后来也被STBP方法借鉴了思路。
2 好文章推荐
1)RNN训练算法-BPTT:RNN
2)梯度消失、梯度爆炸、常用激活函数对比分析:常用的激活函数(Sigmoid、Tanh、ReLU等)
3 LSTM的理解
3.1 三个门的理解
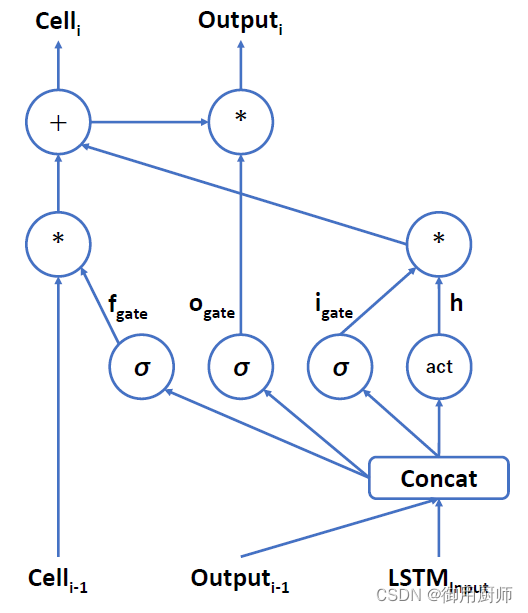
fgate:控制从cell中丢弃哪些信息
igate:确定什么样的新信息要被存放在cell中
ogate:确定输出什么样的值
h:新的候选值
三个门的作用可以理解为 yes or no,h的作用可以理解为 what。
3.2 激活函数的选择
三个σ:sigmoid函数选择更新内容
其他的act:tanh、ReLU、GeLU等,创建新的候选值
3.3 流程
首先,由fgate决定从cell中丢弃哪些信息。
其次,由igate和h决定什么样的新信息要存放在新的cell中。非要分开理解的话,可以这样理解:igate决定什么样的信息我们要更新(yes or no),h决定输入怎样的新信息(what)。
最后,fgate和igate、h对cell更新,从celli-1→celli,由ogate控制要输出哪些信息(或者说信息都给ogate,它决定输不输出)。
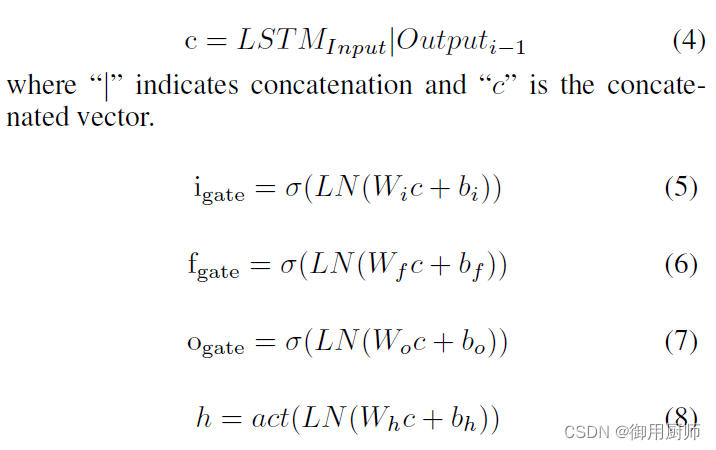
3.4 结合表达式理解
; 4 CNN的理解(参考链接2-3))
这一部分是因为写代码时想不通 conv2d的参数,所以想着记录一下。
4.1 例子
下面的例子, param1、2、3分别代表: height, width, channel。一般卷积核( kernel_size)这个参数只用给出 size(即 height, width),不用给出 channel。为了方便理解,先给出 channel,见 eg1:
eg1
图片样本:[6, 6, 3]
卷积核:[3, 3, 3]
output → [4, 4, 1]
如果没有卷积核的 channel,见 eg2:
eg2
图片样本:[5, 4, 1]
卷积核:[2, 3]
output → [4, 2, 未知](output channel取决于Conv2d的参数)
比如图片样本是 [5, 4, 1],现在进行 nn.Conv2d(1, 4, (2, 3))操作,那么输出的图片就是 [4, 2, 4],前两维的 4和 2是由 样本size和、 kernel size共同决定的,最后一维的 4是自己规定的, output channel是多少,自己定义就好,torch会自动给你匹配你卷积核需要的 channel数。
Original: https://blog.csdn.net/qq_45520647/article/details/123826260
Author: 御用厨师
Title: 神经网络基础知识
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/547947/
转载文章受原作者版权保护。转载请注明原作者出处!