

深度图(depth map)
Depth map 深度图是一张 2D图片,每个像素都记录了从视点(viewpoint)到遮挡物表面(遮挡物就是阴影生成物体)的距离,这些像素对应的顶点对于观察者而言是 “可见的”。
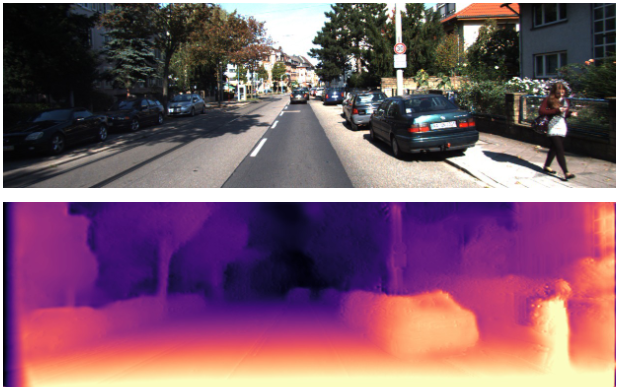

以上图为例,下图为上图真实场景的depth图。
特点:不能体现3D物体的内部特征, 被遮挡的部分无法表示,仅能表示物体相对于视点平面的垂直深度。
体素(voxel)
体素是3D空间中具有一定体积的点,相当于3D空间中的像素(可以参考乐高)。
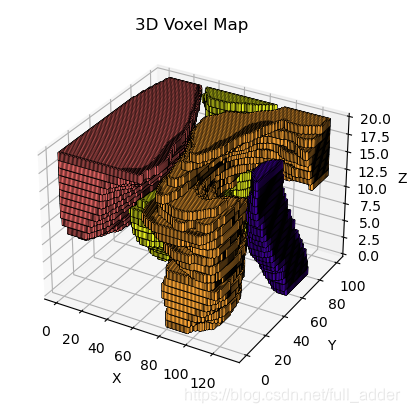
特点:体素本身 不含有位置信息,只谈论与其他体素的相对距离。
点云(Point Cloud)
点云模型往往通过3D激光扫描仪直接获得,故包含了最大量的原始信息。一般来说,点云包括有3D坐标信息,还可以带有色彩信息(RGB)或 反射面强度信息。强度信息与物体的材质,粗糙度,反射率等有关,也与发射激光有关。

三角网格(mesh)
网格可以是多边形,而三角网格就是全部由三角形组成的多边形网格。任意多边形网格都能转换成三角网格。

三角网格存储三类信息:
顶点:每个三角形都有三个顶点,各顶点都有可能和其他三角形共享。.
边:连接两个顶点的边,每个三角形有三条边。
面:每个三角形对应一个面,我们可以用顶点或边列表表示面。
Original: https://blog.csdn.net/awesome666/article/details/123166344
Author: April°
Title: 3D重建几种表现形式——深度图,体素,点云,网格
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/532871/
转载文章受原作者版权保护。转载请注明原作者出处!