

课程一览:


目录

1.opencv中的绘图函数
1.1 线段绘制
函数:cv2.line(img,pts,color,thickness,linetype)
参数说明:
- img:待绘制的图像
- color:形状的颜色,元组如(255,0,0)
- pts:起点和终点
- thickness:线条的粗细。-1位填充,默认值是1。
- linetype:线条的类型,8型或cv2.LINE_AA,默认值为8型。(AA比8型更快,8型比AA型更好看)

#=============================绘制线段============================#
flag = 0
flag = 1
if flag == 1:
# 创建一张黑色的背景图
img=np.zeros((512,512,3), np.uint8)
cv2.imshow("black", img)
cv2.waitKey(0)
cv2.destroyWindow("black")
# 绘制一条线宽为5的线段
cv2.line(img,(0,0),(200,500),(0,0,255),5)
#定义一个变量
winname = 'example'
#将这个名字作为窗口名
cv2.namedWindow(winname)
cv2.imshow(winname, img)
cv2.waitKey(0)
cv2.destroyWindow(winname)
输出结果:

1.2 矩形绘制
函数:cv2.rectangle(img,prets,color,thickness,linetype)
参数说明:
- img:待绘制图像
- pts:左上角和右下角坐标点
- color:形状的颜色,元组如(255,0,0)
- thickness:线条的粗细。-1位填充,默认值是1。
- linetype:线条的类型,使用默认值即可

#=============================矩形线段============================#
flag = 0
flag = 1
if flag == 1:
img = np.zeros((512,512,3),np.uint8)
#绘制矩形
#新图像可以单独命名,也可以直接原位操作
img_2 = cv2.rectangle(img,(23,23),(234,134),(19,0,240),-1)
# cv2.rectangle(img, (23, 23), (234, 134), (19, 0, 240), -1)
cv2.imshow("rectangle",img_2)
cv2.waitKey(0)
cv2.destroyWindow()


1.3 圆、椭圆绘制
绘制圆
函数:cv2.circle(img,pts,radius,color,thickness,linetype)
参数说明:
- img:待绘制图像
- pts:左圆心
- radius:半径
- color:形状的颜色
- thickness:线条的粗细。-1位填充,默认值是1。
- linetype:线条的类型,使用默认值即可

#=============================圆绘制============================#
flag = 0
flag = 1
if flag == 1:
img = np.zeros((512,512,3),np.uint8)
#绘制圆形
#新图像可以单独命名,也可以直接原位操作
#最后一个参数为1则表示不填充
img_2 = cv2.circle(img,(100,100),78,(19,0,240),-1)
# cv2.rectangle(img, (23, 23), (234, 134), (19, 0, 240), -1)
cv2.imshow("rectangle",img_2)
cv2.waitKey(0)
cv2.destroyWindow()

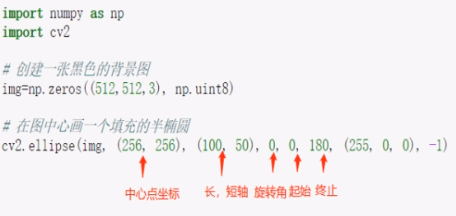
绘制椭圆
函数:cv2.ellipse()
画椭圆需要的参数比较多,请对照后面的代码理解这几个参数。
参数说明:
- 参数1:图像
- 参数2:椭圆中心(x,y)
- 参数3:x/y轴的长度
- 参数4:angle——椭圆的旋转角度
- 参数5:startAngle——椭圆的起始角度
- 参数6:endAngle——椭圆的结束角度
#=============================椭圆绘制============================#
flag = 0
flag = 1
if flag == 1:
img = np.zeros((512,512,3),np.uint8)
#绘制椭圆
#新图像可以单独命名,也可以直接原位操作
#最后一个参数为1则表示不填充
cv2.ellipse(img,(200,100),(78,45),0,30,270,(19,0,240),-1)
cv2.ellipse(img, (200, 250), (78, 45), 0, 0, 360, (19, 0, 240), -1)
cv2.ellipse(img, (200, 400), (78, 45), 30, 180, 360, (19, 0, 240), -1)
# cv2.rectangle(img, (23, 23), (234, 134), (19, 0, 240), -1)
cv2.imshow("picture",img)
cv2.waitKey(0)
cv2.destroyWindow()

1.4 多边形绘制
函数:cv2.polylines(img,pts,isClosed,color,thickness,lineType)
参数说明:
- 参数1:img图像
- 参数2:pts,表示多个坐标点
- 参数3:isClosed,布尔型,True表示的是线段闭合,False表示的是仅保留线段
- 参数4:color,线段颜色,格式是(R,G,B)
- 参数5:thickness,数值型,线宽度,默认值为1,-1则会填充整个图形
- 参数6:lineType,线型

#=============================多边形绘制============================#
flag = 0
flag = 1
if flag == 1:
img = np.zeros((512, 512, 3), np.uint8)
# 定义四个顶点坐标
pts = np.array([[200, 200], [250, 210], [100, 280], [230, 100]])
print(pts)
# 顶点个数:4,矩阵变成4*1*2维
pts = pts.reshape((-1, 1, 2))
print(pts)
#绘制多边形
cv2.polylines(img, [pts], False, (19, 0, 240))
cv2.polylines(img, [pts], True, (19, 0, 240))
cv2.imshow("picture", img)
cv2.waitKey(0)
cv2.destroyWindow()


1.5 添加文字
函数:cv2.putText()
参数说明:
- 参数1:img,图像–画板
- 参数2:要添加的文字
- 参数3:文字的起始坐标(左下角为起点)
- 参数4:字体
- 参数5:文字大小(缩放比例)
- 参数6:颜色
- 参数7:线条宽度
- 参数8:线条形状

#=============================添加文字============================#
flag = 0
flag = 1
if flag == 1:
img = np.zeros((512, 512, 3), np.uint8)
#添加文字
font=cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(img,'OpenCV',(50,200), font, 3,(0,255,255),5)
cv2.imshow("picture", img)
cv2.waitKey(0)
cv2.destroyWindow()

2.图像的几何变换
2.1 图像平移
图像平移:
将图像中所有的点按照指定的平移量水平或垂直移动。
变换公式:
设(x0,y0)为原图像上的一点,图像水平平移量为Tx,垂直平移量为Ty,则平移后的点坐标(x1,y1)变为:
x1 = x0 + Tx; y1 = y0 + Ty
用仿射变换来封装函数
仿射变换函数:cv2.warpAffine(src,M,dsize,flags,borderMode,borderValue)
参数说明:
- src:输入图像
- M:变换矩阵
- M作为仿射变换矩阵,一般反映平移或旋转的关系,为InputArray类型的2×3的变换矩阵
- dsize:输出图像的大小
- flags:插值方法的组合(int类型!)
- 默认为flag = cv2.INTER_LINEAR,表示线性插值
- cv2.INTER_NEAREST(最近邻插值)
- cv2.INTER_AREA(区域插值)
- cv2.INTER_CUBIC(三次样条插值)
- cv2.INTER_LANCZOS4(Lanczos插值)
- borderMode:边界像素模式(int类型!)
- borderValue:(重点!)边界填充值;默认情况下为0。

#=============================图像平移============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('img2.png')
# 构造移动矩阵H
# 在x轴方向移动多少距离,在y轴方向移动多少距离
#[1,0,50]表示在x轴上移动50单位;[0,1,25]表示在y轴上平移25单位
H = np.float32([[1, 0, 50], [0, 1, 25]])
#获取图像的行、列
rows, cols = img.shape[:2]
print(img.shape)
print(rows, cols)
# 注意这里rows和cols需要反置,即先列后行
res = cv2.warpAffine(img, H, (2*cols, 2*rows))
cv2.imshow('origin_picture', img)
cv2.imshow('new_picture', res)
cv2.waitKey(0)
cv2.destroyAllWindows()

2.2 图像缩放
下采样:缩小图像称为下采样或降采样
上采样:方法图像称为上采样,主要目的是得到更高的分辨率

图像缩放:图像缩放是指图像大小按照指定比例进行方法或缩小
函数:cv2.resize(src,dsize=None,fx,fy,interpolation)
参数说明:
- src:原图
- dsize:输出图像尺寸,与比例因子二选一
- fx:沿水平轴的比例因子
- fy:沿垂直轴的比例因子
- interpolation:插值方法
- 默认为flag = cv2.INTER_NEAREST(最近邻插值)
- cv2.INTER_LINEAR,表示线性插值
- cv2.INTER_AREA(区域插值)
- cv2.INTER_CUBIC(三次样条插值)
- cv2.INTER_LANCZOS4(Lanczos插值)
(1)最近邻插值:最简单的一种插值方法,不需要计算,在待求像素的四邻像素中,将距离待求像素最近的邻像素灰度赋给待求像素。(缺点:输出的图像会有锯齿状)
设i+u,j+v(i,j为正整数,u,v为大于零小于1的小数,下同)为待求像素坐标,则待求像素灰度的值f(i+u,j+v)
公式如下:src为原来的坐标,dst为待求的坐标

如图:图像由原来的3×3变为4×4大小的图像
srcWidth为3;dstWidth为4
以待求图的第一个点(0,0)为例:
srcX = (0(3/4),0(3/4))=(0,0)= 234
得出的(0,0)就为原图坐标,则待求点的值就用求出的相对应原图位置的值来代替
以待求图的(3,0)点为例:
srcX = ((3(3/4),(0(3/4))=(3*0.75,0)=(2.25)=(2,0)=89

采用四舍五入的方法求最近坐标

(2)线性插值:
单线性插值:


双线性插值:
双线性插值又叫一阶插值法,它要经过三次插值才能获得最终结果,是对最近邻插值法的一种改进,先对两水平方向进行一阶线性插值,然后再在垂直方向进行一阶线性插值。


#=============================图像缩放============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('img2.png')
# 方法一:通过设置缩放比例,来对图像进行放大或缩小
#缩放因子设置为2,放大两倍
res1 = cv2.resize(img, None, fx=2, fy=2,
interpolation=cv2.INTER_CUBIC)
height, width = img.shape[:2]
# 方法二:直接设置图像的大小,不需要缩放因子
#cv2.INTER_NEAREST(最近邻插值) cv2.INTER_AREA (区域插值) cv2.INTER_CUBIC(三次样条插值) cv2.INTER_LANCZOS4(Lanczos插值)
res2 = cv2.resize(img, (int(0.8*width), int(0.8*height)),interpolation=cv2.INTER_LANCZOS4)
cv2.imshow('origin_picture', img)
#|cv2.imshow('res1', res1)
cv2.imshow('res2', res2)
cv2.waitKey(0)
cv2.destroyAllWindows()
2.3 图像旋转
图像旋转:以图像的中心为原点,旋转一定的角度,也就是将图像上的所有像素都旋转一个相同的角度。旋转都图像的大小一般会改变,即可以把转出显示区域的图像裁取,或扩大图像范围来显示所有的图像。图像的旋转变换也可以用矩阵变换来表示。
设点
逆时针旋转角后的对应点为
那么,旋转后点
的坐标是:

利用上述方法进行图像旋转是需要注意以下两点:
(1)图像旋转之前,为了避免信息的丢失,一定要有坐标平移。
(2)图像旋转之后,会出现许多空洞点。对这些空洞点必须进行填充处理,否则画面效果不好,一般也称这种操作为插值处理。
图像的旋转使用仿射变换函数封装:
变换矩阵函数:cv2.getRotationMatrix2D(center,angle,scale)
参数说明:
- center:图片的旋转中心
- angle:旋转角度
- scale:缩放比例,0.5表示缩小一半
- scale的正负表示旋转方向:正为逆时针,负为顺时针。

#=============================图像旋转============================#
flag = 0
flag = 1
if flag == 1:
img=cv2.imread('img2.png',1)
rows,cols=img.shape[:2]
#参数1:旋转中心,参数2:旋转角度,参数3:缩放因子
#参数3正为逆时针,负值为正时针
#创建一个仿射矩阵
M=cv2.getRotationMatrix2D((cols/2,rows/2),45,1,)
print(M)
#第三个参数是输出图像的尺寸中心
dst=cv2.warpAffine(img,M,(cols,rows))
#dst=cv2.warpAffine(img,M,(cols,rows),borderValue=(255,255,255))
while(1):
cv2.imshow('img', img)
cv2.imshow('img1',dst)
#0xFF==27 ESC
if cv2.waitKey(1)&0xFF==27:
break
cv2.destroyAllWindows()

2.4 图像镜像
2.5 仿射变换
仿射变换的作用:通过仿射变换对图片进行旋转、平移、缩放等操作以达到数据增强的效果。
线性变换从几何直观上来看有两个要点: 变换之前是直线、变换之后依然是直线;直线的比例保持不变。
以下变换分别为:平移、旋转、同比例缩放、不同比例缩放、镜像、剪切

仿射变换:平移、旋转、缩放、剪切、反射
函数:
仿射变换的函数原型如下:
M = cv2.getAffineTransform(pos1,pos2)
pos1表示变换前的位置,三个点
pos2表示变换后的位置,三个点

#=============================仿射变换============================#
flag = 0
flag = 1
if flag == 1:
src = cv2.imread('bird.png')
# 获取图像大小
rows, cols = src.shape[:2]
# 设置图像仿射变换矩阵
pos1 = np.float32([[50, 50], [200, 50], [50, 200]])
pos2 = np.float32([[10, 100], [200, 50], [100, 250]])
M = cv2.getAffineTransform(pos1, pos2)
print(M)
# 图像仿射变换
result = cv2.warpAffine(src, M, (2 * cols, 2 * rows))
# 显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
# 等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()

2.6 透视变换
透视变换:本质是将图像投影到一个新的视屏面
函数:
M = cv2.getPerspectiveTransform(pos1,pos2)
参数说明:
- pos1表示透视变换前的四个点对应位置
- pos2表示透视变换后的四个点对应位置
cv2.warpPerspective(src,M,(cols,rows))
参数说明:
- src表示原始图像
- M表示透视变换矩阵
- (rows,cols)表示变换后的图像大小,rows表示行数,cols表示列数

=============================透视变换============================#
flag = 0
flag = 1
if flag == 1:
#读取图片
src = cv2.imread('bird.png')
#获取图像大小
rows, cols = src.shape[:2]
#设置图像透视变换矩阵
pos1 = np.float32([[114, 82], [287, 156],
[8, 100], [143, 177]])
pos2 = np.float32([[0, 0], [188, 0],
[0, 262], [188, 262]])
M = cv2.getPerspectiveTransform(pos1, pos2)
#图像透视变换
result = cv2.warpPerspective(src, M, (2*cols,2*rows))
#显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()


2.7 小结
例1:利用图像的变换对文档进行矫正

=============================图像矫正============================#
flag = 0
flag = 1
if flag == 1:
#读取图片
src = cv2.imread('paper.png')
#获取图像大小
rows, cols = src.shape[:2]
#将源图像高斯模糊,去除噪声
img = cv2.GaussianBlur(src, (3,3), 0)
#进行灰度化处理
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
#边缘检测(检测出图像的边缘信息)
edges = cv2.Canny(gray,50,250,apertureSize = 3)
cv2.imwrite("canny.jpg", edges)
cv2.imshow("canny", edges)
#通过霍夫变换得到A4纸边缘,这是可以在二值图像中检测直线的方法
lines = cv2.HoughLinesP(edges,1,np.pi/180,50,minLineLength=90,maxLineGap=10)
print(lines)
#下面输出的四个点分别为四个顶点
for x1,y1,x2,y2 in lines[0]:
print(x1,y1)
print(x2,y2)
for x3,y3,x4,y4 in lines[1]:
print(x3,y3)
print(x4,y4)
#绘制边缘
for x1,y1,x2,y2 in lines[0]:
cv2.line(gray, (x1,y1), (x2,y2), (0,0,255), 1)
#根据四个顶点设置图像透视变换矩阵
pos1 = np.float32([[114, 82], [287, 156], [8, 322], [216, 333]])
pos2 = np.float32([[0, 0], [188, 0], [0, 262], [188, 262]])
M = cv2.getPerspectiveTransform(pos1, pos2)
# pos1 = np.float32([[114, 82], [287, 156], [8, 322]])
# pos2 = np.float32([[0, 0], [188, 0], [0, 262]])
# M = cv2.getAffineTransform(pos1,pos2)
print(M)
#图像仿射变换
#result = cv2.warpAffine(src, M, (2*cols, 2*rows))
#图像透视变换
result = cv2.warpPerspective(src, M, (190, 272))
#显示图像
cv2.imshow("original", src)
cv2.imshow("result", result)
cv2.imshow("gray", gray)
#等待显示
cv2.waitKey(0)
cv2.destroyAllWindows()

例2:利用几何变换,对图像进行扩增
=============================图数扩增============================#
flag = 0
flag = 1
if flag == 1:
# 读取图片
img = cv2.imread('test2.png')
image = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 图像平移矩阵
M = np.float32([[1, 0, 80], [0, 1, 30]])
rows, cols = image.shape[:2]
img1 = cv2.warpAffine(image, M, (cols, rows))
# 图像缩小
img2 = cv2.resize(image, (200, 100))
# 图像放大
img3 = cv2.resize(image, None, fx=1.1, fy=1.1)
# 绕图像的中心旋转
# 源图像的高、宽 以及通道数
rows, cols, channel = image.shape
# 函数参数:旋转中心 旋转度数 scale
M = cv2.getRotationMatrix2D((cols / 2, rows / 2), 30, 1)
# 函数参数:原始图像 旋转参数 元素图像宽高
img4 = cv2.warpAffine(image, M, (cols, rows))
# 图像翻转
img5 = cv2.flip(image, 0) # 参数=0以X轴为对称轴翻转
img6 = cv2.flip(image, 1) # 参数>0以Y轴为对称轴翻转
# 图像的仿射
pts1 = np.float32([[50, 50], [200, 50], [50, 200]])
pts2 = np.float32([[10, 100], [200, 50], [100, 250]])
M = cv2.getAffineTransform(pts1, pts2)
img7 = cv2.warpAffine(image, M, (rows, cols))
# 图像的透射
pts1 = np.float32([[56, 65], [238, 52], [28, 237], [239, 240]])
pts2 = np.float32([[0, 0], [200, 0], [0, 200], [200, 200]])
M = cv2.getPerspectiveTransform(pts1, pts2)
img8 = cv2.warpPerspective(image, M, (200, 200))
# 循环显示图形
titles = ['source', 'shift', 'reduction', 'enlarge', 'rotation', 'flipX', 'flipY', 'affine', 'transmission']
images = [image, img1, img2, img3, img4, img5, img6, img7, img8]
for i in range(9):
plt.subplot(3, 3, i + 1), plt.imshow(images[i], 'gray')
plt.title(titles[i])
plt.xticks([]), plt.yticks([])
plt.show()

3.图像滤波与增强
- 滤波实际上是信号处理的一个概念,图像可以看成一个 二维信号,其中像素点的灰度值代表信号的强弱。
- 高频:图像上 变化剧烈的部分
- 低频:图像灰度值 变化缓慢,平坦的地方
- 根据图像高低频,设置高通和低通滤波器。高通滤波器可以 检测变化尖锐,明显的地方,低通可以让 图像变得平滑,消除噪声
- 滤波作用:高通滤波用于 边缘检测,低通滤波用于图像 平滑去噪
- 线性滤波: 方框滤波/均值滤波/高斯滤波
- 非线性滤波: *中值滤波/双边滤波
3.1线性滤波
邻域算子:利用给定像素周围的像素值决定此像素的最终输出值得一种算子。
线性滤波:一种常用的邻域算子,像素输出取决于输入像素的加权和。(卷积操作)


(1)方框滤波
方框滤波被封装在一个名为boxFilter的函数中,即boxFilter函数的作用是使用方框滤波器来模糊一张图片,从src输入,从dst输出。


normalize = True 与均值滤波相同,归一化
normalize = False 很容易发生溢出
函数:cv2.boxFilter(src,depth,ksize,normalize)
参数说明:
- 参数1:输入图像
- 参数2:目标图像深度,一般采用默认值
- 参数3:核大小,默认是3×3
- 参数4:normalize属性,1或 0

=============================方框滤波============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('girl2.png',cv2.IMREAD_UNCHANGED)
r = cv2.boxFilter(img, -1 , (7,7) , normalize = 1)
d = cv2.boxFilter(img, -1 , (3,3) , normalize = 0)
cv2.namedWindow('img',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('r',cv2.WINDOW_AUTOSIZE)
cv2.namedWindow('d',cv2.WINDOW_AUTOSIZE)
cv2.imshow('img',img)
cv2.imshow('r',r)
cv2.imshow('d',d)
cv2.waitKey(0)
cv2.destroyAllWindows()

(2)均值滤波
均值滤波是一种最简单的滤波处理,它取的是卷积核区域内元素的均值,用cv2.blur()实现,如3×3的卷积核:

函数:cv2.blur(src,ksize)
参数说明:
- 参数1:输入原图
- 参数2:kernel的大小,一般为奇数

=============================均值滤波============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('image/opencv.png')
cv2.imshow('img',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
blur = cv2.blur(img,(7,7 ))
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.subplot(122),plt.imshow(blur),plt.title('Blurred')
#不显示坐标
plt.xticks([]), plt.yticks([])
plt.show()

(3)高斯滤波
高斯滤波是一种 线性平滑滤波,适用于 消除高斯噪声,广泛用于 图像处理的减噪过程。高斯滤波的卷积核权重并不相同, 中间像素点权重最高,越远离中心的像素权重越小。(其原理是一个二维高斯函数)
高斯滤波相比均值滤波 效率要慢,但可以 有效消除高斯噪声,能 保留更多的图像细节,所以经常被称为最有用的滤波器。

函数:cv2.Guassianblur(src,ksize,std) ,表示进行高斯滤波
参数说明:
- 参数1:输入原图
- 参数2:高斯核大小
- 参数3:标准差σ,平滑时,调整σ实际是在调整周围像素对当前像素的影响程度,调大σ即提高了远处像素对中心像素的影响程度,滤波结果也就越平滑。

=============================高斯滤波============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('image/median.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
blur = cv2.GaussianBlur(img, (7, 7), 7)
plt.subplot(121), plt.imshow(img), plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(blur), plt.title('Blurred')
plt.xticks([]), plt.yticks([])
plt.show()
可以看到噪声消除了一些

3.2 非线性滤波
(1)中值滤波
中值滤波是一种 非线性滤波,是用像素点邻域灰度值的 中值代替该点的灰度值,中值滤波可以去除 椒盐噪声和斑点噪声。
函数:cv2.medianBlur(img,ksize)
参数说明:
- 参数1:输入图像
- 参数2:核大小

=============================中值滤波============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('image/median.png')
median = cv2.medianBlur(img, 3)
plt.subplot(121), plt.imshow(img), plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(median), plt.title('median')
plt.xticks([]), plt.yticks([])
plt.show()

(2)双边滤波
双边滤波是一种 非线性的滤波方法,是结合图像的 空间邻近度和像素值相似度的一种折中处理,同时考虑空间与信息和灰度相似性,达到 保边去噪的目的,具有 简单、非迭代、局部处理的特点。
函数:cv2.bilateralFilter(src = image,d,sigmaColor,sigmaSpace)
参数说明:
- 参数1:输入原图
- 参数2:像素的邻域直径
- 参数3:灰度值相似性高斯函数标准差
- 参数4:空间高斯函数标准差

=============================双边滤波============================#
flag = 0
flag = 1
if flag == 1:
'''
关于2个sigma参数:
简单起见,可以令2个sigma的值相等;
如果他们很小(小于10),那么滤波器几乎没有什么效果;
如果他们很大(大于150),那么滤波器的效果会很强,使图像显得非常卡通化;
关于参数d:
过大的滤波器(d>5)执行效率低。 对于实时应用,建议取d=5;
对于需要过滤严重噪声的离线应用,可取d=9;
d>0时,由d指定邻域直径;
d<=0时,d会自动由sigmaspace的值确定,且d与sigmaspace成正比; ''' img="cv2.imread('image/bilateral.png')" cv2.color_bgr2rgb) blur="cv2.bilateralFilter(img," -1, 15, 10) plt.subplot(121), plt.imshow(img), plt.title('original') plt.xticks([]), plt.yticks([]) plt.subplot(122), plt.imshow(blur), plt.title('blurred') plt.show()< code></=0时,d会自动由sigmaspace的值确定,且d与sigmaspace成正比;>
加大参数3和参数4的值可以更好的去除噪声

3.3 图像锐化
=============================图像锐化============================#
flag = 0
flag = 1
if flag == 1:
def custom_blur_demo(image):
kernel = np.array([[0, -1, 0], [-1, 5, -1], [0, -1, 0]], np.float32) #锐化
dst = cv2.filter2D(image, -1, kernel=kernel)
cv2.imshow("custom_blur_demo", dst)
src = cv2.imread("./image/sharpen.png")
cv2.namedWindow("input image", cv2.WINDOW_AUTOSIZE)
cv2.imshow("input image", src)
custom_blur_demo(src)
cv2.waitKey(0)
cv2.destroyAllWindows()

3.4 直方图均衡化
(1)灰度图直方图均衡化
目的:直方图均衡化是将原图通过某种变换,得到一幅灰度直方图为均匀分布的新图像的方法
直方图均衡化方法的基本思想是对在 图像中像素个数多的灰度级进行展宽,而对 像素个数少的灰度级进行缩减。从而达到清晰图像的目的。
函数:cv2.equalizeHist(img)
参数说明:
- 参数1:待均衡化图像
步骤:
- 统计直方图中每个灰度级出现的次数
- 计算累计归一化直方图
- 重新计算像素点的像素值。



=============================直方图均衡化============================#
flag = 0
flag = 1
if flag == 1:
#直接读为灰度图像
img = cv2.imread('./image/dark.png',0)
cv2.imshow("dark",img)
cv2.waitKey(0)
#调用cv2.equalizeHist函数进行直方图均衡化
img_equal = cv2.equalizeHist(img)
cv2.imshow("img_equal",img_equal)
cv2.waitKey(0)
cv2.destroyAllWindows()

(2)局部直方图均衡化
flag = 0
flag = 1
if flag == 1:
#局部直方图均衡化
#直接读为灰度图像
img = cv2.imread('./image/dark.png',0)
cv2.imshow("dark",img)
cv2.waitKey(0)
#调用cv2.createCLAHE函数进行局部直方图均衡化
clahe = cv2.createCLAHE(clipLimit=2,tileGridSize=(30,30))
cl1 = clahe.apply(img)
cv2.imshow("img_equal",cl1)
cv2.waitKey(0)
cv2.destroyAllWindows()

(3)彩色图直方图均衡化

flag = 0
flag = 1
if flag == 1:
#彩图直方图均衡化
img = cv2.imread("./image/dark1.jpg")
cv2.imshow("src", img)
# 彩色图像均衡化,需要分解通道 对每一个通道均衡化
(b, g, r) = cv2.split(img)
bH = cv2.equalizeHist(b)
gH = cv2.equalizeHist(g)
rH = cv2.equalizeHist(r)
# 合并每一个通道
result = cv2.merge((bH, gH, rH))
cv2.imshow("dst", result)
cv2.waitKey(0)
cv2.destroyAllWindows()
亮度提升,但提升效果夸张

3.5 Gamma变化
Gamma变换是对输入图像灰度值进行的非线性操作,使输出图像灰度值与输入图像灰度值呈指数关系。

目的:Gamma变换就是用来图像增强,其提升了暗部细节,通过非线性变换,让图像从曝光强度的线性响应变得更接近人眼感受的响应,即 将漂白(相机曝光)或过暗(曝光不足)的图片,进行矫正。
Gamma > 1,图像变亮
Gamma < 1,图形变暗

=============================Gamma变换============================#
flag = 0
flag = 1
if flag == 1:
img=cv2.imread('./image/dark1.jpg')
def adjust_gamma(image, gamma=1.0):
invGamma = 1.0/gamma
table = []
for i in range(256):
table.append(((i / 255.0) ** invGamma) * 255)
table = np.array(table).astype("uint8")
print(table)
return cv2.LUT(image, table)
img_gamma = adjust_gamma(img, 0.8)
#print(img_gamma)
cv2.imshow("img",img)
cv2.imshow("img_gamma",img_gamma)
cv2.waitKey(0)
cv2.destroyAllWindows()

4.图像形态学操作
形态学是图像处理中应用最为广泛的技术之一,主要用于 从图像中提取对表达和描绘区域形状 有意义的图像分量,使后续的识别工作能够 抓住目标对象最为本质的形状特征, 如边界和连通区域等。
结构元素:
设有两幅图像B,X。
若X是被处理的对象,而B是用来处理X的,则称B为 结构元素,又被形象的称作 刷子。
结构原色通常都是一些比较小的图像。
腐蚀和膨胀
图像的 膨胀(Dilation)和 腐蚀(Erosion)是两种基本的形态学运算,其中膨胀类似于”领域扩张”,将图像中的白色部分(领域)进行扩张,其运行结果图比原图的白色区域更大;腐蚀类似于”领域被蚕食”,将图像中白色部分进行缩减细化,其运行结果图比原图的白色区域更小。
4.1 图像腐蚀
(1)灰度图像的腐蚀操作
腐蚀运算符”—”,其定义如下:

该公式表示图像A用卷积模板B来进行腐蚀处理,通过模板B与图像A进行 卷积计算,得出B覆盖区域的像素点最小值,并用这个最小值来代替参考点的像素值。

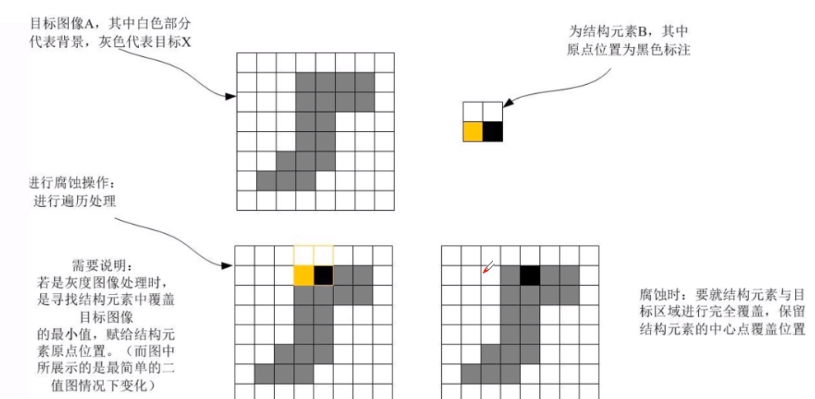
(2)二值图像的腐蚀操作
把结构元素B平移a后得到Ba,若Ba包含于X,我们记下这个a点,所有满足上述条件的a点组成的集合称作X被B腐蚀的结果。如图所示。

其中X是被处理的对象,B是结构元素。对于任意一个在阴影部分的点a,Ba包含于X,所以X被B腐蚀的结果就是那个阴影部分。阴影部分在X的范围之内,且比X小,就像X被剥掉一层似的。
函数:cv2.erode(src,element,anchor,iterations)
参数说明:
- 参数1:src,原图像
- 参数2:element,腐蚀操作的内核,默认为一个简单的3×3矩阵
- 参数3:anchor,默认为point(-1,1),内核中心点
- 参数4:iterations,腐蚀次数,默认值为1
=============================图像腐蚀============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/morphology.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
kernel = np.ones((3,3),np.uint8)
erosion = cv2.erode(img,kernel,iterations = 1)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(erosion),plt.title('erosion')
plt.xticks([]), plt.yticks([])
plt.show()

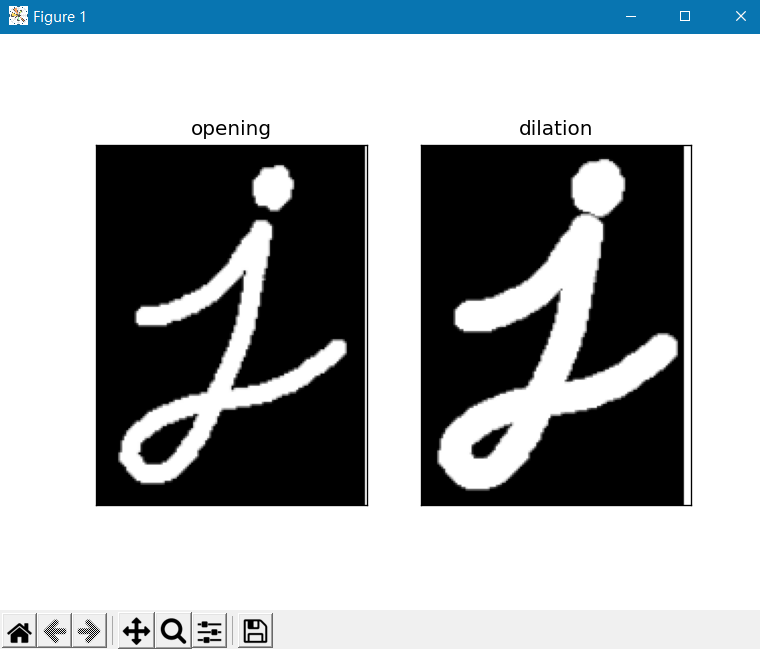
4.2 图像膨胀
膨胀(dilation)可以看做是腐蚀的对偶运算。
其定义是:把结构元素B平移a后得到Ba,若Ba击中(即B的任何一个点碰到X)X,我们记下这个a点。所有满足上述条件的a点组成的集合称作X被B膨胀的结果。如图所示。

其中X是被处理的对象,B是结构元素,对于任意一个在阴影部分的点a,Ba击中X,所以X被B膨胀的结果就是那个阴影部分。阴影部分包括X的所有范围,就像X膨胀了一圈似的。

=============================图像膨胀============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/morphology.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#kernel = np.ones((3,),np.uint8)
# kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (7,7))
# kernel = np.ones((5,5),np.uint8)
# kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, (7,7))
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
dilation = cv2.dilate(img,kernel,iterations = 1)
plt.subplot(121),plt.imshow(img),plt.title('opening')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(dilation),plt.title('dilation')
plt.xticks([]), plt.yticks([])
plt.show()
4.3 开运算
开运算 = 先腐蚀运算,再膨胀运算(看上去把细微连在一起的两块目标分开了),开运算的效果图如下所示:
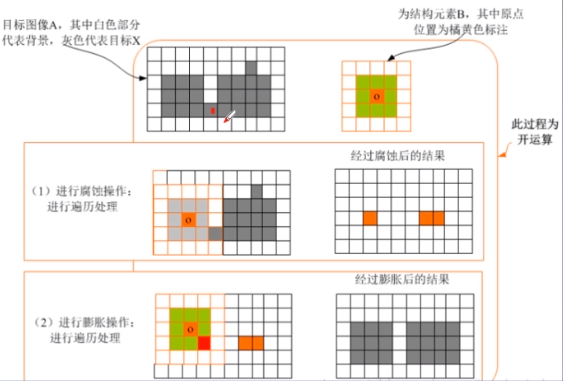
开运算总结:
- 开运算能够去除孤立的小点,毛刺和小桥,而总的位置和形状不变。
- 开运算是一个基于几何运算的滤波器。
- 结构元素大小的不同将导致滤波效果的不同。
- 不同的结构元素的选择导致了不同的分割,即提取出不同的特征。
=============================开运算(去除噪音)============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/open.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#kernel = np.ones((5,5),np.uint8)
kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (5,5))
opening = cv2.morphologyEx(img,cv2.MORPH_OPEN,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(opening),plt.title('opening')
plt.xticks([]), plt.yticks([])
plt.show()
可以看到,噪声被去掉了

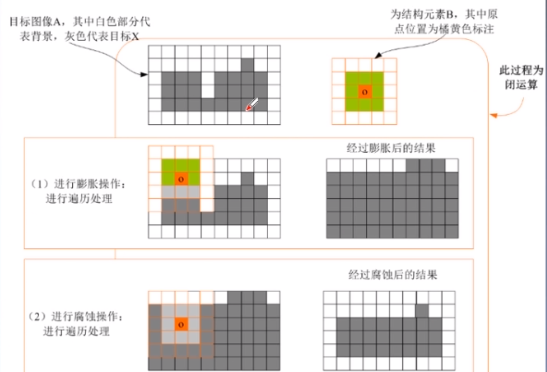
4.4 闭运算
闭运算 = 先膨胀运算,再腐蚀运算(看上去将两个细微连接的图块封闭在一起),闭运算的效果图如图所示:
=============================开运算(去除噪音)============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/close.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
#kernel = np.ones((5,5),np.uint8)
kernel = np.ones((7,7),np.uint8)
closing = cv2.morphologyEx(img,cv2.MORPH_CLOSE,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(closing),plt.title('closing')
plt.xticks([]), plt.yticks([])
plt.show()

闭运算总结:
- 闭运算能够填平小孔,弥合小裂缝,而总的位置和形状不变。
- 闭运算是通过填充图像的凹角来滤波图像的。
- 结构元素大小的不同将导致滤波效果的不同。
- 不同结构元素的选择导致了不同的分割。
4.5 形态学梯度
形态学梯度:
- 基础梯度:基础梯度时用膨胀后的图像减去腐蚀后的图像得到差值图像,也是opencv中支持的计算形态学梯度的方法,而此方法得到梯度有称为基本梯度。
- 内部梯度:是用原图像减去腐蚀后的图像得到差值图像,称为图像的内部梯度。
- 外部梯度:图像膨胀后再减去原来的图像得到的差值图像,称为图像的外部梯度。
=============================形态学梯度============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/morphology.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
kernel = np.ones((3,3),np.uint8)
gradient = cv2.morphologyEx(img,cv2.MORPH_GRADIENT,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(gradient),plt.title('gradient')
plt.xticks([]), plt.yticks([])
plt.show()

4.6 顶帽和黑帽
顶帽(Top Hat):原图像与开运算图的差值,突出原图像中比周围亮的区域。
黑帽(Black Hat):闭操作图像与原图像的差值,突出原图像比周围暗的区域。
顶帽代码:
=============================顶帽============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/morphology.png')
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
kernel = np.ones((9, 9), np.uint8)
tophat = cv2.morphologyEx(img, cv2.MORPH_TOPHAT, kernel)
plt.subplot(121), plt.imshow(img), plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122), plt.imshow(tophat), plt.title('tophat')
plt.xticks([]), plt.yticks([])
plt.show()

黑帽代码:
=============================黑帽============================#
flag = 0
flag = 1
if flag == 1:
img = cv2.imread('./image/morphology.png')
img = cv2.cvtColor(img,cv2.COLOR_BGR2RGB)
kernel = np.ones((9,9),np.uint8)
tophat = cv2.morphologyEx(img,cv2.MORPH_BLACKHAT,kernel)
plt.subplot(121),plt.imshow(img),plt.title('Original')
plt.xticks([]), plt.yticks([])
plt.subplot(122),plt.imshow(tophat),plt.title('tophat')
plt.xticks([]), plt.yticks([])
plt.show()

open CV 代码数据集
点击卡片关注公众号【学姐带你玩AI】
回复 “open CV”领取
Original: https://blog.csdn.net/m0_45447650/article/details/124337092
Author: Billie使劲学
Title: OpenCV(二)——图像基本处理
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/532348/
转载文章受原作者版权保护。转载请注明原作者出处!