

Jetson Xavier NX基于YOLOv5+CSI摄像头实现目标检测
- 文章目录
* - Jetson Xavier NX基础环境搭建
– - YOLOv5环境配置与推理测试
–
+ - 转TensorRT及推理测试
–
+ - Deepstream安装
–
+
文章目录
本文记录了一些博主在部署Jetson Xavier NX和配置CSI摄像头过程中遇到的一些坑,希望能够帮助到大家避开这些坑或是踩到同样坑的小伙伴们能够知道怎么解决。
Jetson Xavier NX基础环境搭建
首先介绍一下我的环境(均基于Jetpack4.6)
比较简单的查看方式是通过jtop查看,jtop类似nvidia-smi的功能(Jetson系列没有nvidia-smi)
(1)安装jtop
NX预装的python版本为2.7.17以及python3.6.9,直接终端输入:
sudo apt-get install python3-pip python3-dev
//接着将pip升级为最新版
python3 -m pip install --upgrade pip
(2)Jtop进行内存/CPU/GPU监视
sudo pip install jetson-stats
sudo systemctl restart jetson_stats.service
sudo jtop
我的环境如下图所示:
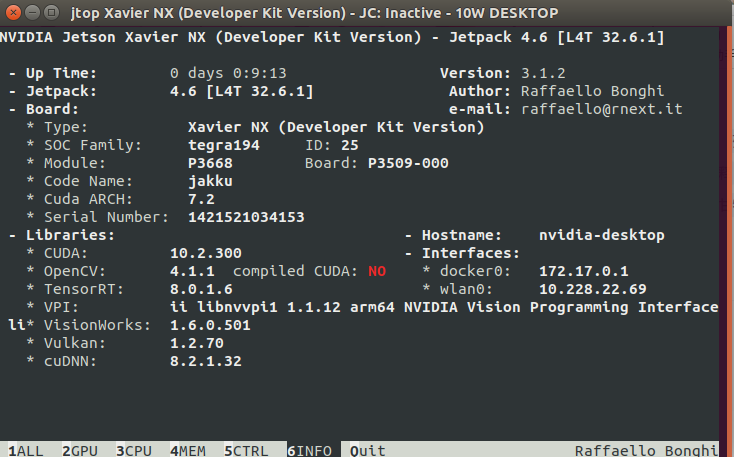

主要关注 jetpack、CUDA、cuDNN、OpenCV、TensorRT的版本
基础环境搭建踩坑指南
1. root用户下安装
以下环境配置最好是在root用户下进行,因为YOLOv5在推理或者测试的时候都会在runs/val(或是detect)/下新建一个exp的文件夹(或者别的名字,可以修改)用来存放结果,而非root用户的话,会出现权限不够的问题。不过问题也不大,可以给runs文件夹增加权限就可以。(博主自己也是配置完了才发现这个问题)。
chmod 777 runs
2. CUDA、Pytorch、Torchvision版本对应
我的Jetson Xavier NX是通过Jetpack 4.6烧录的(烧录教程会在后续文档更新),因此默认cuda版本是:10.2,对应的pytorch版本为1.8.0,如果cuda版本和我的不一样,可以去pytorch官网看一下:
https://pytorch.org/get-started/previous-versions/。
由于Jetson Xavier NX是arm架构,需要下载相对应的torch,然后编译安装。附上一个我安装的torch:torch-1.8.0-cp36-cp36m-linux_aarch64.whl
百度网盘:
链接:https://pan.baidu.com/s/1UuTqBxg2uViguP_ruFod7Q
提取码:f9sz
(1) 安装pytorch
sudo apt-get install python3-pip libopenblas-base libopenmpi-dev
pip3 install Cython
pip3 install numpy torch-1.8.0-cp36-cp36m-linux_aarch64.whl
如果安装cython的时候有问题,可以试试:
apt-get install cython3
(2) 安装torchvision
torchvision与刚刚安装好的torch一定要一一对应,我整理了一份对照表供大家参考,我安装的是1.8.0的torch,因此对应的torchvision版本为0.9.0
torchtorchvisionpython1.9.00.10.0>=3.61.8.10.9.1>=3.61.8.00.9.0>=3.61.7.10.8.2>=3.61.7.00.8.1>=3.61.7.00.8.0>=3.61.6.00.7.0>=3.61.5.10.6.1>=3.51.5.00.6.0>=3.51.4.00.5.0==2.7, >=3.5,
Original: https://blog.csdn.net/weixin_45662297/article/details/123108307
Author: 糯米团子233
Title: Jetson Xavier NX基于YOLOv5+CSI摄像头实现目标检测
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/519436/
转载文章受原作者版权保护。转载请注明原作者出处!