

2021″兆易创新杯”第十六届研究生电子设计竞赛(以下简称”研电赛”)已经结束,在比赛中出现了很多优秀作品,特作为整理
获奖情况:全国二等奖
本项目基于硬件平台EAIDK-310,设计了一套智能行车辅助系统,该系统能完成行人识别与红绿灯识别功能,并被应用于小车。


获奖情况:全国三等奖
该系统基于EAIDK-310作为上位机,通过摄像头对图像的实时获取和处理进行行人识别,路标识别,红绿灯识别等,通过串口通信对stm32下位机进行控制,完成车辆的动作反应。基于LD3320语音模块实现用户感知的语音交互。
【2021研电赛国赛三等奖】上海理工-基于EAIDK-310的云端互联无人驾驶系统
获奖情况:全国三等奖
该系统基于EAIDK-310作为上位机,通过摄像头对图像的实时获取和处理进行行人识别,路标识别,红绿灯识别等,通过串口通信对stm32下位机进行控制,完成车辆的动作反应。基于LD3320语音模块实现用户感知的语音交互。
【2021研电赛Arm杯三等奖】长安大学-基于EAIDK310的智能物料运输车by长安大排档
获奖情况:全国一等奖
本作品搭建了一套打破TI公司垄断的、低延时的4k超高清双激光投影光机电系统,并且本作品兼容性强,通过子板的更换可以兼容各种不同分辨率的数字微镜芯片、为各大投影厂商选择国产方案提供了可定制化的驱动平台,应用前景良好。
【2021研电赛Arm命题三等奖】西交大-模拟自动驾驶的智能小车
获奖情况:全国一等奖
本作品搭建了一套打破TI公司垄断的、低延时的4k超高清双激光投影光机电系统,并且本作品兼容性强,通过子板的更换可以兼容各种不同分辨率的数字微镜芯片、为各大投影厂商选择国产方案提供了可定制化的驱动平台,应用前景良好。

获奖情况:全国一等奖
本团队针对现有摄像头控制器存在的镜头数量少、视频有压缩损耗、本地处理能力弱、传输带宽小、接口灵活性差等不足,提出了一种集采集、处理、显示和传输于一体的硬件解决方案和软件验证平台,该系统采用SOC加大规模FPGA架构,实时采集、处理六路4K/30fps高分辨率视频流,利用HDMI 2.0接口和40G万兆以太网实现本地显示和数据传输。

获奖情况:全国一等奖
本作品是一款高性能、低成本、宽量程、兼容性好、交互性强、易于扩展的PAM4高速误码测试仪。

获奖情况:全国二等奖
本团队针对现有的数据采集系统的不足,设计了一套基于ZYNQ UltraScale+的高速数据采集系统,为数字信号源提供了100路LVDS信号线,数据采集速率可达160Gbps;通过更换系统子板为模拟信号源提供了采集前的预处理(包括模拟域的放大、滤波及模拟信号-数字信号转换),系统还能以5Gsps的采样率采集模拟信号,采样精度为10bit。
获奖情况:全国二等奖
该装置是一种无需专业人员干预的综合性急救设备。它集成了心脏骤停急救所需的所有功能。低风险、全功能、低成本、高智能化、易使用、便于存储和维护。可有效解决现有设备风险高、使用繁琐、成本高、智能化程度低、维护难度大的问题。
[En]
The device is an integrated first aid equipment without the intervention of professionals. It integrates all the functions needed in the first aid of cardiac arrest. Low risk, full function, low cost, high intelligence, easy to use, convenient storage and maintenance. It can effectively solve the problems of high risk, tedious use, high cost, low intelligence and difficult maintenance of the existing equipment.
【2021研电赛全国二等奖】 上海理工大学-智能胸外复苏及电除颤一体仪
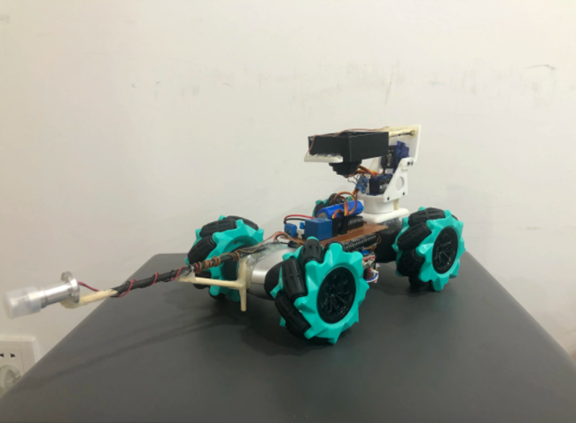
获奖情况:全国二等奖
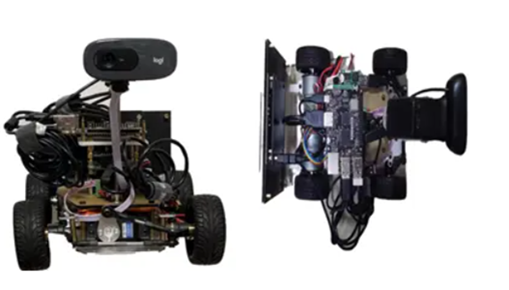
本项目基于EAIDK-310嵌入式开发板,提出了一种自动驾驶方案,设计了一款智能小车。智能小车由软件搭载和硬件组装构成:其中软件部分包括搭载在EAIDK-310上的目标检测模块和语音识别模块;硬件组装包括搭载在STM32上的舵机驱动模块、电机驱动模块以及CCD寻线模块。
获奖情况:全国二等奖
系统主要由视觉采集模块,温湿度传感模块,酒精传感器模块、控制器模块,通讯模块和PC终端上位机、Android app软件组成。在考虑实际应用环境,目标群体后完成了系统的硬件选型,主要包括摄像头系统,控制处理模块。同时设计并搭建了水果监测储藏一体化装置,并针对水果质量监测系统提出了可行的系统软件设计方案。
【2021研电赛全国二等奖】 华东理工大学队伍-基于机器视觉的智能水果质量监测系统
获奖情况:全国二等奖
本工作现已研制成功喷雾执行机构和机械除草机构。与常规无人机喷雾作业相比,喷雾作业飞行耐力强、风干扰小、作业效率高,平台可在大棚内作业,而大棚内无人机喷雾作业难度大。
[En]
This work has now studied and made the spraying executive mechanism and the mechanical weeding mechanism. Compared with the conventional UAV spray operation, the spray operation has strong flight endurance, less wind interference and high operation efficiency, and the platform can work in the greenhouse, while the UAV spray operation in the greenhouse is difficult.

获奖情况:全国三等奖
本作品搭建了一套打破TI公司垄断的、低延时的4k超高清双激光投影光机电系统,并且本作品兼容性强,通过子板的更换可以兼容各种不同分辨率的数字微镜芯片、为各大投影厂商选择国产方案提供了可定制化的驱动平台,应用前景良好。

获奖情况:全国二等奖
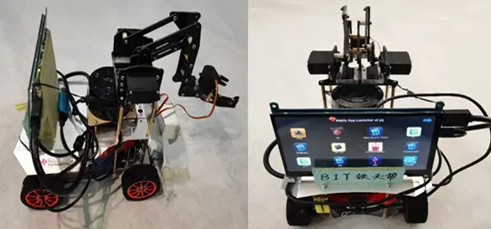
本作品基于TI-RSLK专家版小车,将目标探测、路径规划、图像分类识别、机械臂抓取、循迹回起点、实时监测等功能模块功能整合为一个主控程序,实现对小车的闭环控制,使小车能够自主完成完整的目标抓取并分类过程。运动过程中,通过激光雷达和九轴传感器数据进行位姿解算,实时监测异常状态,并能够根据障碍物的运动情况选择不同的避障方式,可应用于蔬果运输、垃圾分类、AGV导航等无人驾驶领域。
获奖情况:全国一等奖
设计并制造了一种自动障碍物检测机器人。该机器人具有较强的越障能力和爬坡能力。它使用深度学习算法对故障点信息进行检测、分析,并在后台记录,并存储在数据库中。设计了记忆检测策略,使机器人能够自动巡线。并针对这一特定的行业场景,提供了一整套的解决方案。
[En]
An automatic obstacle inspection robot is designed and manufactured. the robot has strong obstacle crossing ability and climbing ability. It uses deep learning algorithm to detect, analyze the fault point information and record it in the background, and store it in the database. The memory inspection strategy is designed so that the robot can patrol the line automatically. And for the power inspection of this specific industry scene, provides a complete set of solutions.

获奖情况:华南赛区一等奖
该产品将机器视觉人工智能与大型装载机相结合,实现无人自动作业或远程控制作业,可自行装料、运输,大大节省人力,真正实现无人作业。该机器根据摄像头数据采集和毫米波雷达定位自行搬运货物。该装载机既可用于平时作业,也可用于危险场所和抢险救灾过程。智能装载机的出现解放了生产力,提高了工作效率,可以极大地避免人为操作带来的问题。保护人员生命安全,提高劳动生产率。
[En]
The product combines machine vision artificial intelligence with large loaders to realize unmanned automatic operation or remote control operation, can load materials and transport by itself, greatly saves labor, and can really operate unmanned. The machine carries goods on its own according to the camera data collection and millimeter wave radar positioning. And the loader can be used in peacetime operations and can also be used in dangerous sites and in the process of rescue and disaster relief. The emergence of intelligent loaders liberates productivity, improves work efficiency, and can greatly avoid problems caused by human operation. Protect the lives of personnel and improve labor productivity.

获奖情况:华南赛区三等奖
基于深度学习,提出了一种新的神经网络结构和数据处理方法来预测蛋白质与化合物的结合性质。
[En]
Based on deep learning, a new neural network structure and data processing method are proposed to predict the binding properties between proteins and compounds.
获奖情况:广西省二等奖
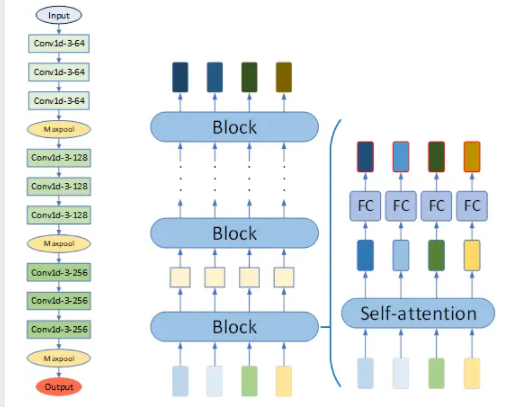
本文设计了一种基于卷积神经网络的集装箱编码识别器,该识别器能够实现高精度的毫秒级运算,并具有人机交互功能。
[En]
This work designs a container code recognizer based on convolutional neural network, which can realize high-precision millisecond operation and has the function of human-computer interaction.

获奖情况:广西省二等奖
本团队设计提出一种新型管道探伤机器人,能够对管道内的裂痕塌陷等管道破损进行识别并记录当前位置,同时向上位机发出警报,工作人员只需打开LED大灯驱动云台对管内部进行查看,检测是否存在管道破损。此外,本设计采用外部传感器实时检测当前机器人运动状态,并能够自动调节自身的行驶状态,保证机器人在圆形管道运行时,能够保持直线行驶状态,无需工作人员手动调节。通过机器人携带的高清摄像头实时获取管道内部图像信息,PC端调用轮廓检测算法模型对图像进行特征提取与表征,并与原图像一同显示在上位机界面。
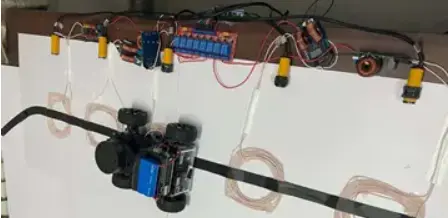
获奖情况:华北赛区一等奖
本项目实现了动态无线充电技术与智能驾驶相融合极术。实现了恒功率管理输出设计,通过浅冲浅放来有效提升车体电池的续航能力。通过搭载激光雷达、摄像头、里程计等传感器实现小车的自主导航与规划避障等功能,采用Gmapping算法实现自主建图功能;在路径规划上采用改进评价函数法来改善局部路径规划效果,并结合全局路径规划来提升小车对路段环境的适应力。在未来自动驾驶电动汽车逐步盛行的时代,动态无线充电技术将在电动汽车远途出行电能补给中扮演着重要角色。
本研究设计、制造和控制了一种基于双轴自平衡反作用轮的倒立摆系统,实现了倒立摆的大角度返回平衡控制,即当摆的初始姿态较大角度偏离垂直状态时,通过调整两个反作用轮,最终使摆杆回到垂直状态并稳定平衡,完成了机器人的设计与实现。
[En]
In this study, an inverted pendulum system based on biaxial self-balancing reaction wheel is designed, manufactured and controlled, and the large-angle return balance control of the inverted pendulum is realized, that is, when the initial attitude of the pendulum deviates from the vertical state at a large angle, the pendulum bar can finally return to the vertical state and stabilize balance through the adjustment of two reaction wheels, and the design and implementation of the robot is completed.

Original: https://blog.csdn.net/weixin_47569031/article/details/119895533
Author: 极术社区
Title: 2021研电赛获奖作品合集
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/512478/
转载文章受原作者版权保护。转载请注明原作者出处!