

前言:
最近要开题了, 自己计划做的是ORBSLAM2结合语义信息, 如果顺利的话再买摄像头采集自己的数据. 因为是自己选的方向, 一直是一个人十分盲目的学, 越学越迷茫, 感觉还是啥都不会. 这篇文章仅记录一下自己的配置过程。
-
由于之前没有学习过神经网络相关内容, 所以配置Mask-RCNN时十分困惑,每个教程写的也不太一样,走了很多弯路.
-
其次因为学校发的电脑是AMD, 没独显, 所以此文记录的是纯CPU版本配置.
-
TODO : 神经网络相关知识, DynaSLAM中的语义信息如何用到SLAM流程中.
1. 参考博客
ubunto18.04编译Dynaslam的痛苦历程—–cpu的版本
Dynaslam编译运行 ubuntu18 + cpu
2. 配置过程
2.1 下载DynaSLAM
git clone https://github.com/BertaBescos/DynaSLAM.git
2.2 库文件配置
之前配过ORB-SLAM2, 这些库都有了, 主要是Pangolin, OpenCV, EIgen, g2o和DBoW2这些.
2.3 boost libraries
sudo apt-get install libboost-all-dev
2.4 MASK-RCNN相关
工具 :
python : 我的pyhton版本为 2.7.17.
pip : 即 python Install Packages, 是一个基于命令行的包管理系统,用于安装管理Python包.
这里要对应python2, 我的版本为 pip 20.3.4.
依赖 :
tensorflow : 基于python的深度学习框架. 我的版本为1.12.3, 先从从清华镜像下的纯cpu版, 再使用pip安装.
sudo pip install tensorflow-1.12.3-cp27-cp27mu-manylinux1_x86_64.whl -i https://pypi.tuna.tsinghua.edu.cn/simple/
keras: tensorflow的API, 用python编写, 用于深度学习的模型设计,调试与评估等.我安装的版本为 2.0.9, 从清华镜像下载.
sudo pip install keras==2.0.9 -i https://pypi.tuna.tsinghua.edu.cn/simple
mask_rcnn_coco.h5: mask-rcnn预训练的权重文件 下载链接 , 此文件需放置在DynaSLAM/src/python路径下.
coco数据集 : 用于生成pycocotools ??
git clone https://github.com/waleedka/coco.git
编译
进入/coco/ PythonAPI路径, 执行以下命令, 再将编译好的pycocotools放到DynaSLAM/src/python路径下.
sudo make install
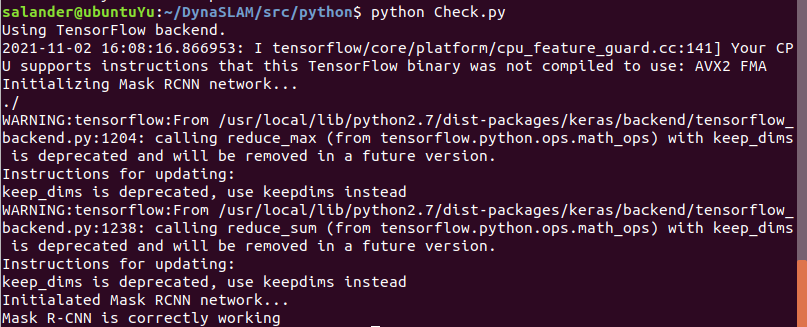
2.5 测试DynaSLAM的MASK-RCNN部分是否可用
修改Check.py文件第17行为:
ROOT_DIR = "./"
执行 :
python Check.py
这里会提示缺少依赖,按提示安装包即可.
遇到以下问题:
- 提示缺少_mask
import pycocotools._mask as _mask
no model named_mask
根据博客修改了当前路径下pycocotools文件的名称,不再报错.
- 好像是语法不对 :


查了很久,根据博客猜测是protobuf版本的问题,降低版本后不再报错!!

以上问题, 这篇博客说可以直接改出错部分的代码, 还没有试验.
; 2.6 编译DynaSLAM
根据博客修改:
- 在 Viewer.cc 中的 imshow函数前添加非空判断.
if(!im.empty()){
cv::imshow("DynaSLAM: Current Frame",im);
}
- DynaSLAM、/Thirdpary/DBoW2和/Thirdparty/g2o三个文件夹下的CMakeLists.txt中的-march=native删除.
最后进入DynaSLAM目录下, 执行build.sh
这里因为我直接执行ubuntu会卡死,所以把build.sh文件中的make全改为了make -j2
chmod +x build.sh
./build.sh
2.7 运行测试集
运行时一直报 总线错误(核心已转储),应该是OpenCV的版本问题,要不装2.4.11版本的OpenCV,要不改动一些源代码的调用。
参考博客 修改了 Conversion.h和 Conversion.cc,不会再报错。
Original: https://blog.csdn.net/weixin_43686942/article/details/121102821
Author: 柘尾鱼
Title: DynaSLAM环境配置(基于ORBSLAM2 纯CPU版)
原创文章受到原创版权保护。转载请注明出处:https://www.johngo689.com/511778/
转载文章受原作者版权保护。转载请注明原作者出处!